最近一條關于谷歌的新聞在科技行業炸開了鍋。谷歌進行了重大的結構性調整,新成立控股公司“字母表”Alphabet,它會在幾個月內速度成為統領谷歌所有業務的母公司。而現在的谷歌會變成旗下的子公司,并且負責的范圍會精簡成搜索、YouTube、安卓和其他一些核心業務。原因有很多,最簡單粗暴的原因就是讓投資人們別再瞎擔心谷歌在"黑科技"方面亂花錢。說起谷歌的尖端"黑科技",比較知名的其中一項就是無人駕駛車。
無人駕駛車的無人駕駛技術,由紅外裝置,慣性INS系統,GPS導航裝置,和雷達測距裝置組成,與射頻微波相關的是后兩種。其中很重要的一項技術就是GPS定位,現在小花來帶大家了解下這項內容。
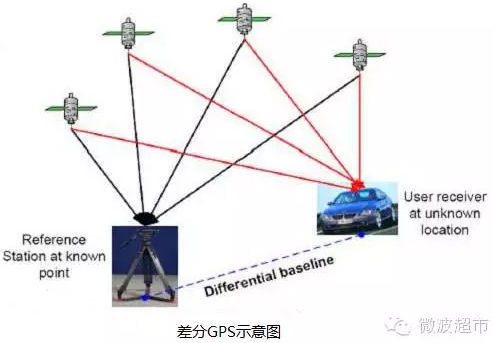
常用的GPS導航高達幾十米的偏差,無法實現無人汽車位置精度的要求,偏差的積累也許都能帶著想去南京的你一路狂飚到上海哦。因此無人汽車要使用精確到毫米級的高精度GPS。那么GPS是什么呢?GPS是一種高精度衛星定位導航系統,基本定位原理是:衛星不間斷地發送自身的星歷參數和時間信息,用戶接收到這些信息后經過計算求出接收機的三維位置三維方向以及運動速度和時間信息。單GPS系統提供的定位精度是優于25米,而為得到更高的定位精度,通常采用差分GPS技術:將一臺GPS接收機安置在基準站上進行觀測。根據基準站已知精密坐標,算出基準站到衛星的距離改正數,并由基準站實時將這一數據發送出去。用戶接收機在進行GPS觀測的同時,也接收到基準站發出的改正數,并對其定位結果進行改正,從而提高定位精度。
但通常的差分GPS技術還是無法滿足無人車對精度的要求,無人車運用的是載波相位差分技術。載波相位差分技術又稱為RTK技術(real time kinematic),是建立在實時處理兩個測站的載波相位基礎上的。它能實時提供觀測點的三維坐標,并達到毫米級的高精度。
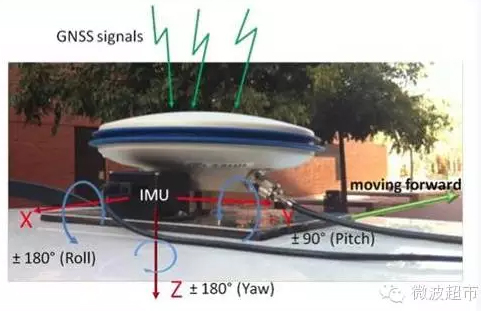
與偽距差分原理相同,由基準站通過數據鏈實時將其載波觀測量及站坐標信息一同傳送給用戶站。用戶站接收GPS衛星的載波相位與來自基準站的載波相位,并組成相位差分觀測值進行實時處理,能實時給出毫米級的定位結果。無人汽車在運用載波相位的基礎上,必須得有兩個固定天線,通過每根天線高頻率的采樣探測出來的位置,就可以模擬汽車的行駛狀態,進而得知它的行駛方向和姿態。
其實無人駕駛技術早就已經在我國農業運用,無人機、電力巡檢等得到了廣泛運用。未來無人駕駛車一定會大力普及,想想輕松到達目的地和駕校師傅臉綠的樣子,真是太興奮了。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號