CMMB智能網(wǎng)絡(luò)監(jiān)測系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
中國移動多媒體廣播(CMMB)是我國自主研發(fā)的、具有完全自主知識產(chǎn)權(quán)的移動多媒體廣播標(biāo)準(zhǔn)。目前,全國各大城市的CMMB網(wǎng)絡(luò)正在建設(shè)和完善當(dāng)中,而CMMB信號的覆蓋測試為網(wǎng)絡(luò)優(yōu)化和調(diào)整提供了重要的數(shù)據(jù)依據(jù)。數(shù)字電視廣播網(wǎng)絡(luò)的建設(shè)是一個(gè)長期復(fù)雜的過程,需要經(jīng)過不斷地調(diào)整和優(yōu)化才能達(dá)到一個(gè)理想的效果。而只有有效、精確的網(wǎng)絡(luò)覆蓋測試才能為調(diào)整、優(yōu)化提供可靠的依據(jù)。一個(gè)成熟穩(wěn)定的CMMB網(wǎng)絡(luò)覆蓋測試系統(tǒng),對于CMMB的發(fā)展具有重大意義。因此,有必要設(shè)計(jì)一款針對CMMB網(wǎng)絡(luò)的覆蓋測試系統(tǒng)。
本設(shè)計(jì)基于高性能單片機(jī)STM32和GPRS無線通信方案實(shí)現(xiàn)了對測試點(diǎn)CMMB網(wǎng)絡(luò)覆蓋情況的實(shí)時(shí)監(jiān)測,并利用GPS接收器將測試終端的地理位子信息上傳到服務(wù)器端,完成了對監(jiān)測終端的精準(zhǔn)定位。
終端板卡供電方式采用太陽能供電系統(tǒng),保障其在無電源和人員看守的情況下長期穩(wěn)定的工作。最后通過綜合測試,能實(shí)現(xiàn)所有要求的功能,完全滿足本次設(shè)計(jì)的要求。
1 測試需求分析
為了對測試點(diǎn)進(jìn)行實(shí)時(shí)準(zhǔn)確的信息監(jiān)測,需要做好以下幾點(diǎn)。測試地點(diǎn)的地理位置,包括經(jīng)度、緯度,至少每秒統(tǒng)計(jì)一次;終端板卡供電蓄電池電量實(shí)時(shí)更新;8 M信號帶寬內(nèi)的平均功率,單位為dBm,每秒統(tǒng)計(jì)一次,測量精度達(dá)到±1 dBm;CMMB信號解碼LDPC誤包率、RS誤包率,每秒統(tǒng)計(jì)一次;服務(wù)器端可以隨時(shí)更改信息上報(bào)時(shí)間間隔,并能對終端調(diào)諧器、解調(diào)器配置參數(shù)進(jìn)行更改,以適應(yīng)不同地區(qū)解調(diào)參數(shù)的不同。
2 總體設(shè)計(jì)
本系統(tǒng)分為測試終端和服務(wù)器端,服務(wù)器端只需要一臺性能良好的個(gè)人計(jì)算機(jī),而測試終端主要由以下幾個(gè)模塊構(gòu)成:射頻前端模塊模塊、功率測量與存儲模塊、GPS接收器、太陽能供電模塊、處理器模塊及GPRS無線通信模塊。各個(gè)模塊主要是通過STM32微處理器的GPIO口連接與通信。處理器需要對射頻前端的調(diào)諧器和解調(diào)器進(jìn)行調(diào)諧頻道和解調(diào)參數(shù)設(shè)置,并對RS誤包率、LDPC誤包率等信息進(jìn)行讀取。CMMB信號調(diào)諧器主要是對從天線接收的高頻信號進(jìn)行調(diào)諧輸出中頻信號;CMMB調(diào)諧解調(diào)模塊主要是對信號進(jìn)行解調(diào)和信道解碼;功率的測量與存儲模塊負(fù)責(zé)將信號功率轉(zhuǎn)換為電平信號送給STM32的ADC和將系統(tǒng)設(shè)置參數(shù)進(jìn)行存儲,GPS接收器用于獲取監(jiān)測點(diǎn)地理位子信息,最后處理器通過GPRS無線模塊將信息發(fā)送至服務(wù)器端并從服務(wù)器接收控制命令。系統(tǒng)整體結(jié)構(gòu)如圖1所示。

3系統(tǒng)硬件設(shè)計(jì)
3.1射頻前端模塊
射頻前端模塊包括調(diào)諧單元和解調(diào)單元。
本系統(tǒng)中RF射頻信號的調(diào)諧模塊采用MXL5007,芯片能夠通過天線或有線接收從44~885 MHz連續(xù)頻段信號,并將輸入的RF射頻信號進(jìn)行調(diào)諧輸出4~44 MHz的中頻信號;此芯片還具有對原始的RF射頻信號無損耗的環(huán)出功能,這使得芯片再輸出中頻信號給功率測量模塊的同時(shí),還能無損耗的環(huán)出一路CMMB信號到后級的解調(diào)模塊,是本系統(tǒng)調(diào)諧器的理想選擇。
調(diào)諧解調(diào)模塊選用了創(chuàng)毅視訊公司的IF206型號的芯片,IF206芯片支持CMMB廣播信道標(biāo)準(zhǔn)和復(fù)用標(biāo)準(zhǔn);可同時(shí)接收衛(wèi)星信號和地面信號;低功耗、低成本、對前端后端設(shè)備無特殊要求。
3.2 GPRS無線通信模塊
本系統(tǒng)選用GPRS無線通信方案,采用Fibocom的G600模塊,支持Dual 900/1800或850/1900雙頻。G600模塊外觀小巧,功耗低,GPRS數(shù)據(jù)連接可靠,內(nèi)置TCP/IP協(xié)議棧,G600模塊采用串口通信
3.3 GPS接收器
監(jiān)測終端通過GPS接收器采集監(jiān)測點(diǎn)地理信息,包括:經(jīng)緯度、海拔等,測試系統(tǒng)根據(jù)得到的GPS信息在地圖的相應(yīng)位置顯示測試數(shù)據(jù)。本系統(tǒng)中選用GTS-4E-00模塊,采用郵票貼片封裝,可適應(yīng)高溫高濕,電磁干擾等惡劣工作環(huán)境。其簡化的電路圖如圖2中所示,TXD連接STM32串口1,模塊喚醒端連接PA9,J1為接收天線。
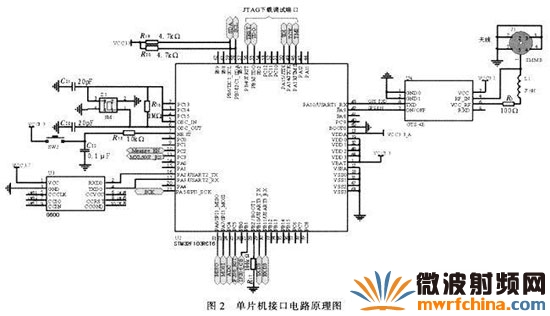
3.4處理器模塊
處理器是整個(gè)監(jiān)測終端的核心,負(fù)責(zé)采集射頻前端的數(shù)據(jù)以及與服務(wù)器端的通信。處理器采用STM32F103RCT6型單片機(jī),該芯片是基于Cortex-M3內(nèi)核的新型32位嵌入式微處理器,它集合了性能高,實(shí)時(shí)、低功耗、集成度高等特點(diǎn),系統(tǒng)時(shí)鐘高達(dá)72 M,開發(fā)簡便且芯片內(nèi)集成多種外設(shè)。單片機(jī)電路圖如圖2所示。
其中單片機(jī)的PB6、PB7口為其IIC接口,負(fù)責(zé)與MXL5007、存儲芯片AT24C1024通信;PA5-PA7口是其SPI接口,用于與IF206通信;PA10口是串口1接收端,用于接收GPS模塊數(shù)據(jù),PA9口用于使能GPS模塊;PA2、PA3是串口3,用于與GPRS模塊G600通信;PC2、PC3分別作為MXL5007的使能和復(fù)位端;STM32內(nèi)部還有兩個(gè)12位ADC,PC4是內(nèi)部ADC1模擬輸入口,用于測量CMMB信號平均功率。
3.5太陽能供電模塊
測試終端采用太陽能供電方式,使得終端可以長期穩(wěn)定的工作在缺少電源、無人管理的狀太下。監(jiān)測終端板卡電源接口采用DC-12 V,采用太陽能供電方式,設(shè)計(jì)控制器對蓄電池進(jìn)行充放電管理。本控制器為太陽能直流供電系統(tǒng)設(shè)計(jì),并使用了專用電腦芯片的智能化控制器。控制器功能框圖如圖3所示。

4系統(tǒng)軟件設(shè)計(jì)
STM32處理器的軟件編程采用C語言編程,開發(fā)環(huán)境為MDK-4.0,軟件基本原理如圖4所示。
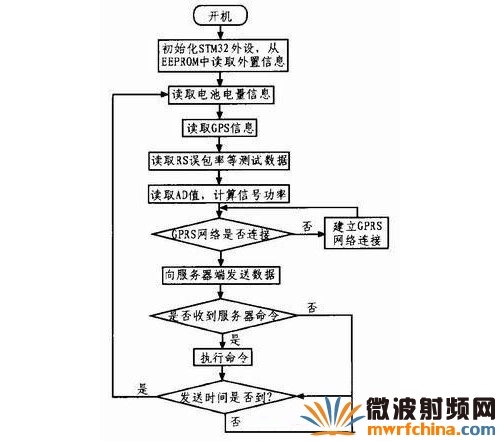
開機(jī)后系統(tǒng)進(jìn)行初始化,包括STM32各個(gè)外設(shè)的初始化、從EEPROM中讀取系統(tǒng)之前設(shè)置的參數(shù)值、對MXL5007和IF206的初始化。系統(tǒng)初始化完成后分別讀取太陽能蓄電池剩余電量信息、GPS信息、RS誤包率、LDPC誤碼率、信號平均等信息,之后判斷是否與服務(wù)器建立連接,連接建立成功后按照設(shè)定時(shí)間間隔定時(shí)向服務(wù)器上傳這些數(shù)據(jù);與此同時(shí)時(shí)刻查收來自服務(wù)器端的命令信息,如設(shè)定更改信息上傳時(shí)間間隔、各參數(shù)門限值、調(diào)諧及解調(diào)芯片的頻點(diǎn)等,參數(shù)被修改后立即被存入EEPROM中,防止斷電信息丟失,下次開機(jī)后這些參數(shù)再次被讀取出來。
5 設(shè)備樣機(jī)與系統(tǒng)聯(lián)調(diào)
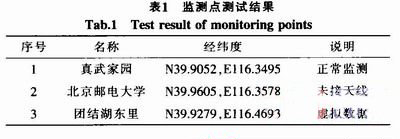
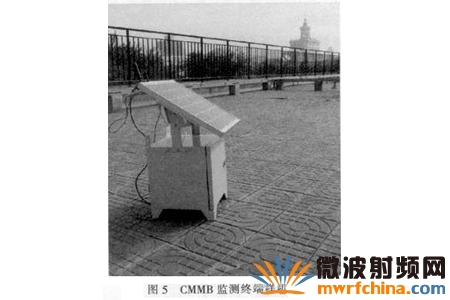
測試終端設(shè)備樣機(jī)與服務(wù)器端軟件完成后,項(xiàng)目組使用設(shè)備樣機(jī)和服務(wù)器軟件進(jìn)行了系統(tǒng)聯(lián)調(diào)。項(xiàng)目組在北京市選取了3個(gè)監(jiān)測點(diǎn),監(jiān)測點(diǎn)信息如表1所示,3個(gè)監(jiān)測點(diǎn)分別放置了一臺CMMB監(jiān)測終端,如圖5所示。
各個(gè)監(jiān)測點(diǎn)實(shí)時(shí)回傳監(jiān)測參數(shù)到服務(wù)器,服務(wù)器通過IP網(wǎng)絡(luò)獲得監(jiān)測數(shù)據(jù),并且根據(jù)軟件設(shè)置進(jìn)行分析和報(bào)警處理,服務(wù)器軟件的監(jiān)測界面如圖6所示。
通過設(shè)備聯(lián)調(diào),項(xiàng)目組優(yōu)化了系統(tǒng)性能,提高了系統(tǒng)的穩(wěn)定性,經(jīng)過數(shù)天的實(shí)驗(yàn),證明監(jiān)測系統(tǒng)能夠及時(shí)有效地反應(yīng)CMMB網(wǎng)絡(luò)的信號狀況。
6 結(jié)論
該監(jiān)測系統(tǒng)采用了處理器STM32開發(fā)平臺和GPRS無線通信方案,成功地實(shí)現(xiàn)了對用戶端CMMB網(wǎng)絡(luò)覆蓋情況的實(shí)時(shí)監(jiān)測,為廣大工程技術(shù)人員提供了一種高效、便捷的監(jiān)管手段,達(dá)到了設(shè)計(jì)要求。
 粵公網(wǎng)安備 44030902003195號
粵公網(wǎng)安備 44030902003195號