本文來自2018 年6 月25 日出版的《 中興通訊技術(shù) 》,作者是中興通訊股份有限公司無線經(jīng)營部朱伏生總工。
雷達通信的概念約在21 世紀初被提出來 [1-5],雷達通信一體化概念的提出則是為了適應未來高科技戰(zhàn)爭。雷達系統(tǒng)和通信系統(tǒng)作為電子戰(zhàn)平臺的基本組成部分,在軍事方面的作用至關(guān)重要。長期以來,這些系統(tǒng)都是各自縱向發(fā)展,但隨著技術(shù)的進步,各系統(tǒng)間的差距逐漸減少,于是系統(tǒng)間的橫向一體化發(fā)展問題開始受到關(guān)注,即從橫向上對現(xiàn)有系統(tǒng)進行融合,使其具備通用性和多功能性。如果能實現(xiàn)雷達通信一體化,不僅能夠減少電子戰(zhàn)平臺的體積和電磁干擾,更可以提升戰(zhàn)場指揮效率。
雖然雷達系統(tǒng)和通信系統(tǒng)由于用途的不同在工作方式、功能實現(xiàn)和信號特征等方面都存在顯著差異,但從系統(tǒng)原理來看,雷達技術(shù)和通信技術(shù)都與電磁波在空間的發(fā)射和接收有關(guān)。從系統(tǒng)結(jié)構(gòu)來看,兩者的硬件系統(tǒng)都包括天線、發(fā)射機、接收機和信號處理器等模塊;從技術(shù)的發(fā)展趨勢來看,雷達由傳統(tǒng)硬件器件實現(xiàn)的功能正在由數(shù)字信號處理來取代完成。同時,通信系統(tǒng)的載頻也轉(zhuǎn)移到微波領域,與傳統(tǒng)雷達使用的頻率處于同一數(shù)量級。因此,雷達系統(tǒng)和通信系統(tǒng)從硬件結(jié)構(gòu)實現(xiàn)到軟件算法處理都正在趨同。雷達系統(tǒng)和通信系統(tǒng)的一體化首先是以共用相同的硬件平臺為基礎。最簡單的是時分共享的方式,利用選通開關(guān),雷達系統(tǒng)和通信系統(tǒng)分時復用天線、發(fā)射機和接收機等硬件平臺,但是這種方式下兩個系統(tǒng)都不可能連續(xù)長時間地占用資源,否則就會影響另一個系統(tǒng)的性能;而本系統(tǒng)也由于工作時間有限而使得系統(tǒng)性能受限。
另一種硬件平臺共享的方式主要用于相控陣雷達,將二維陣列分成多個子陣,每個子陣獨立工作,用于實現(xiàn)雷達或通信功能,但是由于子陣的功率受限,雷達和通信系統(tǒng)的性能都會受到影響。因此,這種硬件共享、獨立實現(xiàn)雷達和通信功能的一體化技術(shù)由于資源受限不僅對系統(tǒng)性能有影響,而且限制了系統(tǒng)效率的提升。因此,近年來雷達通信一體化的研究開始關(guān)注信號方面的融合,即在同一硬件平臺上利用同一信號實現(xiàn)雷達和通信功能。車載雷達通信系統(tǒng)利用車輛已經(jīng)裝載的毫米波雷達以及雷達通信一體化技術(shù),不僅可以實現(xiàn)車載雷達探測和車間通信功能,而且不會額外增加汽車的硬件模塊,也不會因為通信功能的引入而使得汽車的電磁環(huán)境更加復雜,既降低成本又可以提高頻譜利用率。因此,車載雷達通信系統(tǒng)將會成為雷達通信一體化技術(shù)從軍事應用轉(zhuǎn)向民用領域的重要突破之一。
1、車載雷達通信系統(tǒng)的研究意義
車載雷達通信系統(tǒng)正面對巨大的市場機遇。一方面,各國政府對交通安全的重視升級,自動緊急剎車、前向碰撞告警、車道偏離告警等汽車安全技術(shù)不斷被納入相關(guān)的法律法規(guī)。另一方面,自動駕駛成為全球研究的熱點,更在「中國制造2025」中上升為國家戰(zhàn)略之一。
目前業(yè)界采用的高級駕駛輔助系統(tǒng)僅依靠搭載的攝像頭、紅外、激光雷達等各種車載傳感器來為單車智能駕駛提供輔助。而與高級駕駛輔助系統(tǒng)相比,車載雷達通信系統(tǒng)是在車載毫米波雷達系統(tǒng)上一體化實現(xiàn)現(xiàn)代通信技術(shù),在實現(xiàn)雷達探測功能的同時建立車聯(lián)網(wǎng)的通信連接,使汽車同時具備復雜環(huán)境感知、信息共享、智能化決策等功能,為智能駕駛提供最有效的保障。車載雷達通信系統(tǒng)不僅具有毫米波雷達的探測優(yōu)勢,即在車輛對周圍環(huán)境感知的功能上具有全天候、全天時、高精度、高分辨率的特點,而且可以通過車載雷達通信系統(tǒng)建立的車聯(lián)網(wǎng)實現(xiàn)車輛自身及其周圍環(huán)境信息的傳遞與共享,車輛可以獲得超視距范圍的環(huán)境認知,從而使車輛具有了「視覺+聽覺」的能力。因此,車載雷達通信系統(tǒng)是支持智能駕駛和智慧交通最基礎、最有效的手段。
并且,隨著5G 通信時代的來臨,通信的頻段已不限制于6 GHz 以下,而是擴展到十幾吉赫茲到幾十吉赫茲的微波波段。而車載雷達通信系統(tǒng)可使用全球統(tǒng)一的頻譜,即24 GHz、77 GHz、79 GHz 頻段。這些頻段與5G 高頻通信頻段和微波通信頻段接近。因此,基于雷達技術(shù)和通信技術(shù)的同源性,通過研究車載雷達通信系統(tǒng),不僅使得車-車間通過車載雷達建立車車通信聯(lián)網(wǎng)成為可能,而且可對5G 高頻通信技術(shù)的研究提供技術(shù)積累。
2、車載雷達通信系統(tǒng)的研究現(xiàn)狀
2.1 雷達通信一體化的評價指標
雷達通信一體化的評價指標包括雷達指標和通信指標。通常雷達指標主要涉及雷達對目標的距離、速度、角度等各方面的測量要求,主要包括測量范圍、測量精度、分辨率等指標。通信指標主要為信噪比、數(shù)據(jù)速率等,且通信功能的引入不能降低雷達的探測性能。以下主要介紹雷達指標。
2.1.1 距離
(1)雷達作用距離雷達的作用距離可由雷達方程來得出,雷達方程將雷達的作用距離和雷達發(fā)射、接收、天線和環(huán)境等各因素聯(lián)系起來,可以反映雷達各參數(shù)對雷達作用距離的影響程度。基本雷達方程為:
其中,R_max 是雷達的最大作用距離,P_t 是雷達發(fā)射功率,G_t 和G_r 分別是發(fā)射天線和接收天線的增益,σ 是雷達截面積,S_sim 是雷達接收機最小可檢測信號功率。
(2)測距范圍測距范圍包括最小可測距離和最大單值測距范圍。最小可測距離是指雷達能測量的最近目標距離。對于脈沖雷達來說,收發(fā)天線是共用的,在發(fā)射脈沖寬度 τ 的時間內(nèi),接收機無法接收目標回波,在發(fā)射脈沖結(jié)束后將天線收發(fā)開關(guān)轉(zhuǎn)換到接收狀態(tài)也需要一定的時間t_0,接收機也不能接收目標回波。因此,雷達的最小可測距離為:
雷達的最大單值測距范圍由脈沖重復周期T_m 決定。為保證單值測距,通常應選取T_m ≥2R_max/c,其中R_max 是被測目標的最大作用距離。當雷達重復頻率不能滿足單值測距的要求時,將產(chǎn)生距離模糊。
(3)距離分辨率距離分辨率通常是指同一方向上兩個大小相同的點目標之間的最小可區(qū)分距離。對于簡單的脈沖雷達信號,脈沖越窄,距離分辨力越好。對于復雜的脈沖壓縮信號,決定距離分辨率的是雷達信號的有效帶寬B,有效帶寬越寬,距離分辨率越好。距離分辨率可表示為:
(4)測距精度測距精度是指雷達對被測目標距離測量的準確度,一般用均方根誤差來表示。理論上,單個強散射點距離的最小均方根誤差可以表示為:

其中,E/N_0 為信噪比。可以看出: 雷達的測距精度與信號帶寬和信噪比成反比。
2.1.2 速度
根據(jù)多普勒頻率,其中v_r 為徑向速度,測速精度可以表示為:
速度分辨率為:

其中,τ 是信號持續(xù)時間,正比于信號時寬。可以看出: 測速精度和速度分辨率都與信號時寬成反比,且信號波長越短,測速精度和速度分辨率越高。
2.1.3 角度
角度的測量與天線孔徑有關(guān),若天線的半功率波束寬度為:

則方位角或俯仰角的測量精度可以表示為:
2.2 雷達通信一體化系統(tǒng)的波形設計
雷達通信一體化系統(tǒng)最大的挑戰(zhàn)就是找到合適的信號能同時完成信息的傳遞和雷達探測功能。雷達和通信的參數(shù)都跟信道特性有關(guān),最主要的信道特性是多普勒頻率和最大多徑時延,并且由于回波經(jīng)歷了二倍的傳播路徑,因此這些特性對雷達的影響更大。除了信道的物理特性外,還有一些只針對雷達性能的限制,主要跟雷達的模糊函數(shù)有關(guān)。
傳統(tǒng)雷達波形設計的目的是得到具有最優(yōu)自相關(guān)特性的波形來保證雷達探測性能。雷達波形的選擇要考慮3 個性能因素:目標距離、多普勒和方位角。對于車載雷達來說,在交通密集的區(qū)域,波形應能有效地對抗干擾和噪聲。而通信的主要性能指標包括:覆蓋范圍、時延、數(shù)據(jù)速率、系統(tǒng)容量等。通信波形的選擇是要保證能對抗各種信道衰落以及多用戶干擾從而正確的解調(diào)解碼出通信信息。
考慮到現(xiàn)有雷達的實現(xiàn)技術(shù)和現(xiàn)有的通信技術(shù),車載雷達通信一體化信號的主要研究方向有:基于線性調(diào)頻的雷達通信 [4]、基于擴頻的雷達通信 [6-9]、基于OFDM 的雷達通信 [10-11]。當然,這些技術(shù)還可進一步與多天線 [7]、波束賦形等技術(shù)結(jié)合起來。
2.3 基于線性調(diào)頻的雷達通信
基于線性調(diào)頻的雷達通信主要分為2 類:基于準正交波形疊加的方案 [4-5]和基于單一波形的方案 [11-13]。在單一波形方案中,又可分成2 類:基于波形分離方案 [9,14]和基于分數(shù)階傅里葉變換的方案 [6]。
2.3.1 基于準正交波形疊加的方案
在基于準正交波形疊加的方案 [4-5]中,雷達信號和通信信號使用相互「正交」的波形,例如:雷達探測可以使用Down-Chirp 信號(頻率隨時間線性下降),通信數(shù)據(jù)可以使用Up-Chirp 信號(頻率隨時間線性上升),并使用2 個「正交」的匹配濾波器分別提取期望的信號。用戶之間的數(shù)據(jù)可以通過不同的調(diào)頻斜率、不同的發(fā)射時間、不同的起始頻率等來區(qū)分。此方案中,雷達信號為:

通信信號為:

雷達信號和通信信號在一個雷達脈沖內(nèi)是基本正交的。
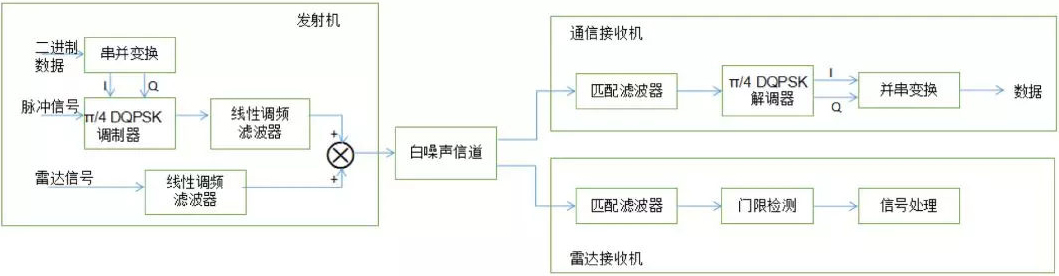
圖1、基于準正交波形疊加的方案的示意圖(DQPSK:四相相對相移鍵控)
基于準正交波形疊加的方案的示意圖如圖1 所示。
2.3.2 基于波形分離方案
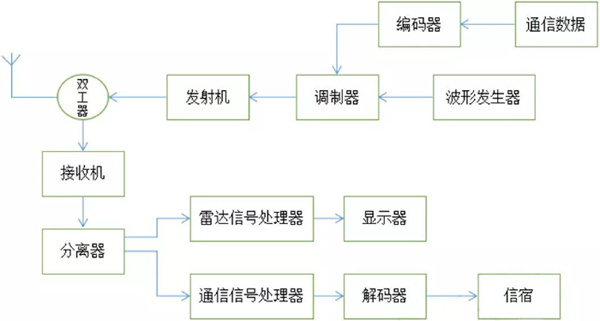
圖2、基于波形分離的方案的示意圖
基于波形分離方案的示意圖如圖2 所示[13]。在發(fā)射端,編碼后的通信信息調(diào)制到雷達波形上發(fā)射。在接收端,通過分離器將雷達信號和通信信號進行分離之后再分別進行處理。分離的方法包括同態(tài)濾波、白化等。
2.3.3 基于分數(shù)階傅里葉變換的方案

圖3、基于分數(shù)階傅里葉變換的方案的示意圖(FRFT:分數(shù)傅里葉變換)
基于分數(shù)階傅里葉變換(FRFT)方案的示意圖如圖3 所示 [11]。雷達信號和通信信號是同一個,通信數(shù)據(jù)調(diào)制在不同的初始頻率的Chirp 信號上,接收端使用分數(shù)階傅里葉變換分別把通信數(shù)據(jù)和雷達信號提取出來。
2.3.4 基于擴頻的雷達通信
為了獲得較好的通信性能,可以考慮使用具有良好自相關(guān)特性的擴頻信號來作為雷達通信一體化的信號。系統(tǒng)只發(fā)射一個擴頻信號,一方面,系統(tǒng)利用自己發(fā)射的信號回波進行目標探測,實現(xiàn)雷達功能;另一方面系統(tǒng)通過該發(fā)射信號給另外的系統(tǒng)發(fā)射通信數(shù)據(jù)。用戶之間的數(shù)據(jù)通過不同的擴頻碼來區(qū)分。一個雷達接收到的信號 [7]為:

用本地碼與接收到的雷達信號做相關(guān)之后得到:

在對公式進行簡化之后,當 τ= 2R/c_0 - (k-i)T 時,可得到相關(guān)峰值。此時,k = i + 2R/(c_0*T),進而知道了目標的距離、使用的擴頻碼,可以進一步解調(diào)出數(shù)據(jù),并得到目標速度(從碼相位推出)。
2.3.5 基于OFDM 的雷達通信
OFDM 信號 [10]也是目前雷達通信一體化系統(tǒng)波形設計的研究內(nèi)容之一。OFDM 信號作為雷達信號,具有圖釘狀的模糊函數(shù),同時具有距離和多普勒的高分辨率,而沒有距離——多普勒耦合問題,可以獨立地處理距離和多普勒信息。
但OFDM 信號對多普勒頻移更加敏感,會破壞回波子載波之間的正交性,從而需要頻偏估計與補償。另外,OFDM 信號具有較高的峰值平均功率比(PAPR),如果要獲得較高的發(fā)射功率,則要盡量降低信號的PAPR 并采用大動態(tài)范圍的線性放大器。
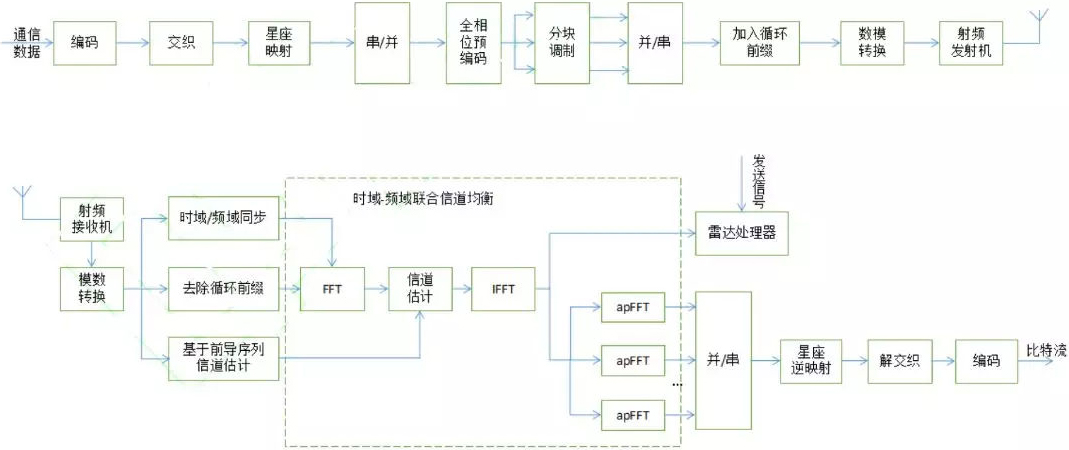
圖4、基于OFDM 方案的示意圖(FFT:快速離散傅里葉變換;IFFT:離散傅里葉逆變換)
基于OFDM 信號的雷達通信示意如圖4 所示[10]。雷達信號和通信信號是同一個,一個雷達收到的自己的回波為 [7]:

用其跟本地發(fā)射的信號相除,然后經(jīng)過一系列離散傅里葉逆變換(IDFT)/離散傅里葉變換(DFT)運算之后,即可得到距離(R)和速度(f_D)。
其他雷達收到上述信號后,進行快速傅里葉變換(FFT)運算、解調(diào)、解碼之后即可得到通信數(shù)據(jù)。
2.4 仿真/測試結(jié)果
目前,雷達通信一體化信號的研究主要集中在調(diào)頻連續(xù)波、擴頻信號、正交頻分復用技術(shù)(OFDM)信號這3 種類型,相關(guān)的研究和仿真也多是基于這3 種類型。
2.4.1 雷達性能
2.4.1.1 線性調(diào)頻方案的仿真/測試結(jié)果
文獻[4] 中,作者使用了Up-Chirp 信號(雷達)和Down-Chirp 信號(通信)(它們基本正交),Chirp 信號的調(diào)頻率為40 MHz/μs,系統(tǒng)帶寬為80 MHz,脈沖時間為2 μs(頻率從最低到最高所需要的時間),處理增益(時寬帶寬積)為22 dB,數(shù)據(jù)調(diào)制方式是π/4-DQPSK;射頻頻率為10 GHz。
從文獻[4] 中的仿真結(jié)果可知:當信號與干擾加噪聲比(SINR)超過15 dB 時,檢測概率可達到85%(或更高),從而可以檢測出大多數(shù)目標。
文獻[5] 中,作者使用了Up-Chirp 信號(雷達)和Down-Chirp 信號(通信)(它們基本正交),Chirp 信號的調(diào)頻率為1 GHz/μs,載波頻率為750 MHz,系統(tǒng)帶寬為500 MHz,脈沖時間為0.5 μs(頻率從最低到最高所需要的時間),處理增益(時寬帶寬積)為24 dB;數(shù)據(jù)調(diào)制方式是二進制相移鍵控(BPSK),射頻頻率為75 MHz,發(fā)射功率為27 dBm。
從文獻[5] 的測試結(jié)果可知:其雷達通信系統(tǒng)能可靠地區(qū)分出10 m 之外的2 個相隔63 cm 的目標。另外,文獻[5] 還提到,其目標檢測概率為99%。
2.4.1.2 直接序列擴頻方案的仿真/測試結(jié)果
文獻[11] 中,作者使用的仿真設置為:使用m 序列來擴頻(SF=15,31,63,127,255);碼片速率為48 MCps;信號帶寬為96 MHz;數(shù)據(jù)長度為256 個符號,數(shù)據(jù)調(diào)制方式為BPSK。從文獻[11]的仿真結(jié)果可知:當SINR 超過0 dB 時,峰值旁瓣(PSL)(SF=255)達到40 dB,從而能有效地區(qū)分出2 個不同的目標。
2.4.1.3 OFDM 方案的仿真/測試結(jié)果
文獻[7]中,作者使用的仿真設置為:載波頻率為5.9 GHz,全相位OFDM 子載波個數(shù)為512,CP 長度為1.4 μs,加入CP 后的全相位OFDM 符號長度為23.8 μs,系統(tǒng)帶寬為91.5 MHz,一幀內(nèi)的全相位OFDM 符號個數(shù)為177,一幀的時間長度為4.25 ms,子載波間隔為180 kHz。從文獻[7]的仿真結(jié)果可知:當SINR 超過0 dB 時,距離的均方誤差(MSE)幾乎接近于0,從而能有效地區(qū)分出2 個不同的目標;當SINR 超過0 dB 時,Doppler 頻移的MSE 約為100 Hz(等價于5 m/s,18 km/h),從而能有效地區(qū)分出2 個不同的運動速度。
從上面的仿真結(jié)果可以看出:3 種雷達通信的方案能有效地檢測出目標。
2.4.2 通信性能
2.4.2.1 線性調(diào)頻方案的仿真/測試結(jié)果
文獻[4]中,作者使用了Up-Chirp 信號(雷達)和Down-Chirp 信號(通信)(它們基本正交),Chirp 信號的調(diào)頻率為40 MHz/μs,系統(tǒng)帶寬為80 MHz,脈沖時間為2 μs(頻率從最低到最高所需要的時間),處理增益(時寬帶寬積)為22 dB,數(shù)據(jù)調(diào)制方式是π/4-DQPSK;射頻頻率為10 GHz。
從文獻[4]的仿真結(jié)果可知:當SINR 超過11 dB 時,誤碼率(BER) 低于0.1%,從而可以滿足一般的通信性能需求。
2.4.2.2 直接序列擴頻方案的仿真/測試結(jié)果
文獻[7] 中,作者使用的仿真設置如下:載波頻率為2 MHz,采樣頻率為20 MHz,使用m 序列來擴頻,擴頻因子為15 或31,碼片寬度為1 μs,數(shù)據(jù)調(diào)制方式為差分相干二進制相移鍵控(DBPSK),數(shù)據(jù)長度為2000 個符號。
從文獻[7] 的仿真結(jié)果可知:當SINR 超過3 dB 時,BER(SF=15 的)低于0.1%,從而可以滿足一般的通信性能需求。
2.4.2.3 OFDM 方案的仿/測試真結(jié)果
文獻[10] 中,作者使用的仿真設置如下:載波頻率為5.9 GHz,全相位OFDM 子載波個數(shù)為512,CP 長度為1.4 μs,加入CP 后的全相位OFDM 符號長度為23.8 μs,系統(tǒng)帶寬為91.5MHz,一幀內(nèi)的全相位OFDM 符號個數(shù)為177,一幀的時間長度為4.25 ms,子載波間隔為180 kHz。
從文獻[10] 中的仿真結(jié)果可知:當SINR 超過8.2 dB 時,BER 低于0.1%,從而可以滿足一般的通信性能需求。
從上面的仿真結(jié)果可以看出:3 種雷達通信的方案在不太高的SINR 下能較好地傳輸數(shù)據(jù)。
2.5 試驗/測試系統(tǒng)
2.5.1 基于線性調(diào)頻的雷達通信試驗系統(tǒng)
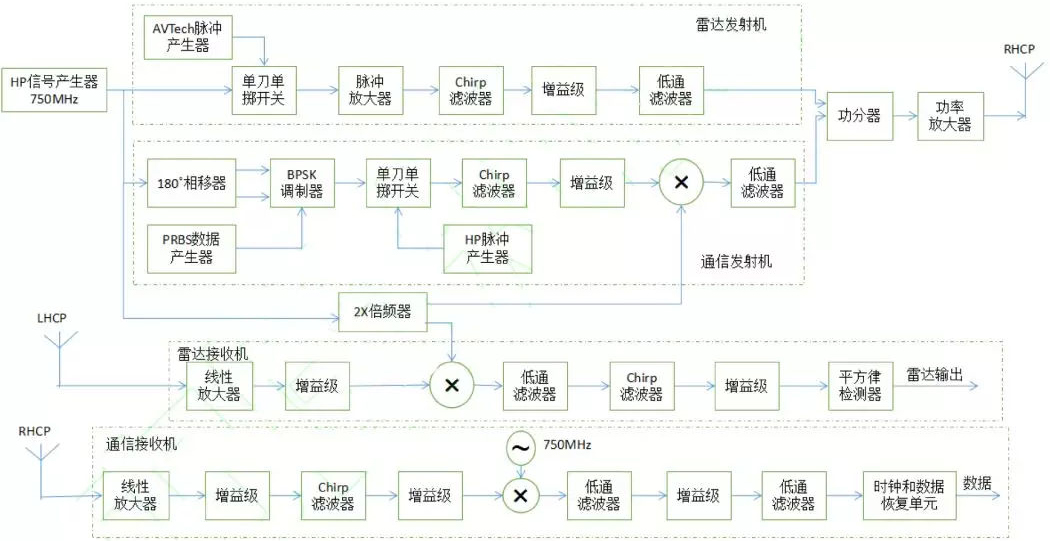
圖5、基于線性調(diào)頻的雷達通信實驗系統(tǒng)(LHCP:左旋圓偏振;PRBS:偽隨機二進制序列;RHCP:右旋圓偏振)
如圖5 所示[5]:該系統(tǒng)的工作頻率為750 MHz,帶寬為500 MHz,距離分辨率為63 cm,雷達檢測概率為99%,虛警為7%。在1 Mbit/s 速率下的BER 為0.002(這時雷達脈沖重復頻率為150 kHz,雷達脈沖時間寬度1.5 ns)。
2.5.2 基于直接序列擴頻的雷達通信測試系統(tǒng)

圖6、基于直接序列擴頻的雷達通信測試系統(tǒng)(信號處理板卡)
圖6 為(南京理工大學)基于直接序列擴頻的雷達通信測試系統(tǒng)(信號處理板卡),由現(xiàn)場可編程門陣列(FPGA)、模數(shù)轉(zhuǎn)換(A/D)、數(shù)模轉(zhuǎn)換(D/A)等組成[8]。該系統(tǒng)使用30 MHz中頻、31 位m 序列擴頻,通信速率為129 kbit/s,PSL 為13 dB。
2.5.3 基于OFDM 的雷達通信試驗系統(tǒng)
圖7、OFDM 超寬帶合成孔徑雷達試驗系統(tǒng)
美國邁阿密大學研制了超寬帶合成孔徑雷達,并使其成為通信雷達一體化系統(tǒng),圖7 為他們在實驗室研制的OFDM 超寬帶合成孔徑雷達試驗系統(tǒng) [15-16]。
2.6 小結(jié)
從以上的仿真和試驗系統(tǒng)可以看出:車載雷達通信系統(tǒng)可以使用多種信號來實現(xiàn),最簡單的是使用目前最常用的雷達信號——調(diào)頻連續(xù)波(FMCW),通信信息直接調(diào)制在該信號上,也可以使用現(xiàn)有的通信信號,比如擴頻信號和OFDM 信號。根據(jù)仿真驗證:
24 GHz 車載雷達通信系統(tǒng)的雷達作用距離可達100 m,通信距離則在500 m 以上,數(shù)據(jù)的傳輸速率最高可達20 Mbit/s(采用OFDM 信號);
使用77 GHz 車載雷達通信系統(tǒng)的話,雷達的測距范圍和有效的通信距離基本相當,可達250 m,峰值數(shù)據(jù)速率為20 Mbit/s(采用OFDM 信號),而距離和速度的分辨率和精度都遠高于24 GHz 系統(tǒng)。
其中,距離分辨率可小于1 m,測速范圍可達 ±200 km/h。至于時延指標,除了傳播時延和系統(tǒng)處理時延外再無其他網(wǎng)絡時延,可以滿足汽車安全的時延要求 [17-19]。
因此,從仿真驗證的結(jié)果來看,車載雷達通信系統(tǒng)完全可以在不損失雷達性能的條件下實現(xiàn)車聯(lián)網(wǎng)通信,不僅可以為車輛提供駕駛輔助的各項功能,而且獲得更遠視角的道路信息,滿足智能駕駛對傳感器感知信息和網(wǎng)聯(lián)信息融合的需求。
3、結(jié)束語
在技術(shù)創(chuàng)新的驅(qū)動下,通信、互聯(lián)網(wǎng)與各行業(yè)的融合發(fā)展日新月異,萬物互聯(lián)的時代已經(jīng)開啟,不僅包括人與人、人與物之間的聯(lián)接,也包括物與物之間的聯(lián)接,車聯(lián)網(wǎng)就是其中重要的組成部分。
而對于汽車產(chǎn)業(yè),伴隨著人們對汽車駕駛的舒適度、安全性等用戶需求的提升,自動駕駛成為人們追求的炙手可熱的目標之一。目前自動駕駛產(chǎn)業(yè)整體水平處于Level 1/Level 2(根據(jù)美國NTHSA 或SAE 標準)或駕駛輔助(根據(jù)中國SAE 標準)水平,中國的先進駕駛輔助的各主要功能的新車滲透率除了車身電子穩(wěn)定系統(tǒng)之外都不足10%。
根據(jù)中國汽車工程學會發(fā)布的信息,中國到2020 年將推進以自主環(huán)境感知為主、網(wǎng)聯(lián)信息服務為輔的部分自動駕駛的應用,到2025 年重點形成網(wǎng)聯(lián)式環(huán)境感知能力并實現(xiàn)復雜工況下的高度自動駕駛,到2030 年通過V2X 協(xié)同控制實現(xiàn)完全自動駕駛。
因此,如何從目前低滲透率的駕駛輔助階段快速有效地推進到具有自主環(huán)境感知能力和網(wǎng)聯(lián)功能的自動駕駛階段成為關(guān)鍵問題。通過車載雷達通信系統(tǒng),車輛不僅可以通過自身雷達探測功能感知周圍環(huán)境,更可以在車輛之間建立通信網(wǎng)絡,通過協(xié)作式的通信獲得更廣范圍的區(qū)域信息。遠近信息的融合不僅為車輛自身的安全駕駛提供有力的保障,更可以實現(xiàn)全道路的智能駕駛和整體交通效率的提升。
因此,車載雷達通信系統(tǒng)將會成為自動駕駛產(chǎn)業(yè)最核心的傳感器之一,加速智能網(wǎng)聯(lián)汽車的產(chǎn)業(yè)化進程,進而提升自動駕駛產(chǎn)業(yè)的整體水平。
參考文獻
[1] ETSI. Electromagnetic compatibility and Radio Spectrum Matters (ERM); Short Range Devices; Road Transport and Traffic Telematics (RTTT); Radar equipment operating in the 76 GHz to 77 GHz range; Part 1: Technical characteristics and test methods for radar equipment Operating in the 76 GHz to 77 GHz Range: EN 301 091-1 V1.3.3. 2006.11[S].2006[2] HUGHES P K, CHOE J Y. Overview of Advanced Multifunction RF Systems (AMRFS) [C]//Phased Array Systems and Technology, 2000. Proceedings. 2000 IEEE International Conference on, USA: IEEE. 2000: 21–24. DOI: 10.1109/PAST.2000.858893
[3] ANTONKI P, BONNEAU R, BROWN R, et al. Bistatic Radar Denial/Dmbedded Communications via Waveform Diversity[C]// Proceedings of the Radar Conference, 2001. USA:IEEE, 2001:41–45
[4] ROBERTON M. Integrated Radar and Communications Based on Chirped Spread-Spectrum Techniques[C]//Microwave Symposium Digest2003 IEEE MTT-S International. USA: IEEE, 2003. DOI: 10.1109/MWSYM.2003.1211013
[5] GEORGE N. SADDIK. Ultra-Wideband Multifunctional Communications/Radar System[J]. IEEE Trannsactions on Microwave Theory and Techniques, 2007, 55(7): 1431 – 1437. DOI:10.1109/TMTT.2007.900343
[6] 楊基慧. 倒車雷達系統(tǒng)的研究與設計[D]. 長春:吉林大學,2012
[7] STURM C. Waveform Design and Signal Processing Aspects for Fusion of Wireless Communications and Radar Sensing [J]. Proceedings of the IEEE, 2011, 99(7): 1236 – 1259. DOI:10.1109/JPROC.2011.2131110
[8] 郁如圣. 基于制導雷達的通信信號處理研究[D]. 南京: 南京理工大學, 2012
[9] LG Electronics. Status Report for WI on LTE-based V2X Services: RP-162553[R]. Austria,2016
[10] 周英.車聯(lián)網(wǎng)環(huán)境下的雷達通信一體化信號分析與設計[D].長沙:湖南大學,2014
[11] 李曉柏. 基于Chirp 信號的雷達通信一體化研究[J]. 雷達科學與技術(shù), 2012,10(2): 180-186
[12] 陳正輝. MIMO 雷達OFDM-LFM 波形設計與實現(xiàn)[J].雷達科學與技術(shù), 2013,11(1): 77-81
[13] 鄒廣超. 雷達通信一體化設計的信號與處理方法研究[D]. 無錫: 江南大學, 2011
[14] 張江濤. 77GHz 車載雷達的研究[D]. 西安:西安電子科技大學, 2014
[15] 霍凱. OFDM 新體制雷達研究現(xiàn)狀與發(fā)展趨勢[J].電 子 與 信 息 學 報, 2015,37(11):2776-2789, 2015
[16] DMITRIY G, JONATHAN S, KYLE K, et al. Wideband OFDM System for Radar and Communications [C]//IEEE National Radar Conference-Proceedings. USA: IEEE, 2009: 1-6. DOI:10.1109/RADAR.2009.4977024
[17] SKOLNIK,M. 雷達系統(tǒng)導論[M].北京:電子工業(yè)出版社, 2007
[18] 保錚.雷達成像技術(shù)[M]. 北京:電子工業(yè)出版社, 2005
[19] GINI F. Waveform Design and Diversity for Advanced Radar Systems [M]. British: The Institution of Engineering and Technology, 2012
 粵公網(wǎng)安備 44030902003195號
粵公網(wǎng)安備 44030902003195號