李儼,高路
(高通無線通信技術(中國)有限公司,北京100013)
摘要:針對5G 新空口- 車用無線通信(NR-V2X)技術中的直連通信應用于自動駕駛場景的頻譜需求進行研究,給出頻譜需求研究方法、假設參數和評估結果。在NR-V2X 系統中,使用廣播模式發送承載狀態信息和環境信息的消息,這部分消息需要至少30~40 MHz 的頻率。NRV2X的組播模式可以支持自動駕駛群組間協商和決策。盡管組播模式對于支持高級應用更為關鍵,但由于群組通信基本上是事件觸發,通過組播模式傳輸的總業務量遠遠少于廣播消息的總業務量,在進行NR-V2X 頻率研究的初期可以暫不考慮組播模式的頻率需求。
關鍵詞:5G NR-V2X;廣播模式;組播模式;傳感器共享應用;頻率
自動駕駛是目前汽車產業乃至整個科技行業中最受關注的技術之一,將會在不久的將來出現在我們的生活中。車車直連通信對于支持安全可靠的自動駕駛業務至關重要,自動駕駛的感知、決策和執行3 個層面都將受益于車聯網技術而得到增強。基于蜂窩網車用無線通信(C-V2X)技術作為車輛中其他車載傳感器的補充而在全球范圍內被廣泛接受,并將成為5G 的先導性應用得到部署。C-V2X通過提供360°非視距(NLOS)感知,大大擴展車輛檢測道路參與者的能力。尤其在盲點交叉路口或惡劣天氣狀況下,更能體現其相對傳統車載傳感器的優勢。
2017 年6 月, 第三代合作伙伴計劃(3GPP)完成并發布了長期演進(LTE)-V2X R14 標準。R14 LTE-V2X可以支撐汽車基礎安全應用。對于車輛來說,具備這些通信要求,就能可靠地與其他附近車輛、基礎設施節點(路邊單元)以及行人交換狀態信息,例如位置、速度和航向,并且還能夠及時向鄰近實體傳播告警消息。LTE-V2X 的頻譜需求在中國通信標準化協會(CCSA)以及5G 汽車協會(5GAA)等全球標準化組織已得到充分研究,得出的共識是需要為LTE-V2X 分配20~30 MHz 以支持基礎安全應用,包括車到車(V2V)、車到基礎設施(V2I)和車到行人(V2P)應用[1-2]。
3GPP R16 開展了C-V2X 演講技術的研究,并且在5G 新空口(NR)的框架上制訂5G NR-V2X 標準, 其靈活的設計可以支持需要低時延和高可靠性的高級車聯網應用。NR-V2XPC5(直連通信)框架的靈活性允許輕松擴展NR 系統,支持未來進一步發展更先進的V2X 業務和其他業務[3]。3GPP 計劃在2020 年3 月完成5G NRV2X核心標準化工作。5G NR-V2X 技術可以進一步實現和增強多維度自動化,例如感知、規劃、定位、意圖共享(ADAS)和傳感器信息共享等。5GNR-V2X PC5 有不同的通信模式,包括廣播模式和組播模式。組播通信模式用于支持群組內的特定互動消息,通常有較高可靠性要求,如群組協商、群組決策、反饋消息等。5G NR-V2X將與LTE-V2X 共存,并針對不同的用例。LTE-V2X 將提供基礎安全服務,而5G NR-V2X 將用于支撐自動駕駛等高級汽車應用。本文中,我們主要針對自動駕駛5G NR-V2X 直連通信頻譜需求進行研究。
1、頻率需求研究方法
利用系統負載和系統吞吐量之間的關系,將預期提供的分組業務量映射到所需的系統容量,稱為業務負載映射方法。該方法在V2X 直連通信系統容量和頻譜分析中廣為采納[1-2], [4-7]。
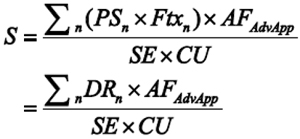
針對5G NR-V2X 中的先進應用,一個新的參數激活因子需要被引入,它將反映發送傳感器共享信息等先進應用消息的車輛在所有交通參與車輛中所占的比例。5G NR-V2X 對頻譜需求估計S 可以用公式(1)表示:
 (1)
(1)
其中,
· n = 1,..., NbVehiclesInRange。NbVehiclesInRange 是有效通信范圍內的車輛數量,它取決于車輛的平均速度和有效的通信范圍。
· PSn 是在有效通信范圍內第n輛車發送的數據包大小,由應用的業務量模型確定,單位是比特。
· Ftxn 是在有效通信范圍內第n輛車的消息發送頻率,由應用的業務量模型確定,單位為赫茲。
· SE 是無線技術的頻譜效率,單位為bit/(s·Hz)。它在發射機側進行測量,并由NR-V2X 所采用的調制和信道編碼方案確定。
· CU 是無線信道的最大資源利用率,反映了由于信號衰減、同道干擾等因素造成的接收端的頻譜效率的下降。
· DRn 是有效通信范圍內第n 輛車的數據速率,可以通過PSn ×Ftxn 進行計算。
· AFAdvApp 是發送先進應用消息的用戶在所有交通參與車輛中所占的比例,稱之為激活因子。
3GPP 尚未完成5G NR-V2X PC5的無線接入部分的標準化,因此需要對NR PC5 的頻譜效率和信道利用率進行估算。可以基于1 s 周期內并在40 MHz 信道帶寬內的總信息比特數來估計NR-V2X 的頻譜效率[8],頻譜效率約為0.712 bit/(s·Hz)。
信道利用率可以給定一個假設范圍,例如,下界可以與LTE-V2X 頻譜需求率采用的下界相同,即0.336[9]。對于上界,我們可以假設為80%,這對于可以實現更好的調度協調的單播或多播通信是可能的。隨著3GPP 標準化發展,可以根據系統設計估計更為準確的數值。
2、通信需求和業務建模
3GPP 于2016 年完成了針對5GNR-V2X 的通信需求研究[10-12],其中一些通信需求考慮得比較理想,主要面向較長期的自動駕駛系統設計。從2016 年之后,自動駕駛技術發展迅速,針對近期和中期的通信需求又提出了更為實際的通信需求,5GAA 等組織與汽車廠商密切合作,針對通信需求進行了細化和總結[13-14]。
5G NR-V2X PC5 有不同的通信模式,包括廣播模式和組播模式。例如,編隊行駛可以使用組播模式,而傳感器共享更依賴廣播模式。
2.1 廣播模式
傳感器共享也稱為合作式環境感知,是最早支持自動駕駛的應用,它使用了NR-V2X 直連通信的廣播模式。
根據豐田汽車公司的研究[15],傳感器共享消息大小被建模為350 B+ x *50 B,其中350 B 被假定為基礎安全消息的平均有效載荷大小,x 表示車輛從本地傳感器觀察到的其他對象的數量。50 個字節表示描述單個對象的信息量。如果假設x 為25,那么如圖1 所示中央紅色汽車將感知周圍的25 輛黃色汽車。自動駕駛消息大小為1 250 B,發送頻率為10 Hz[16]。
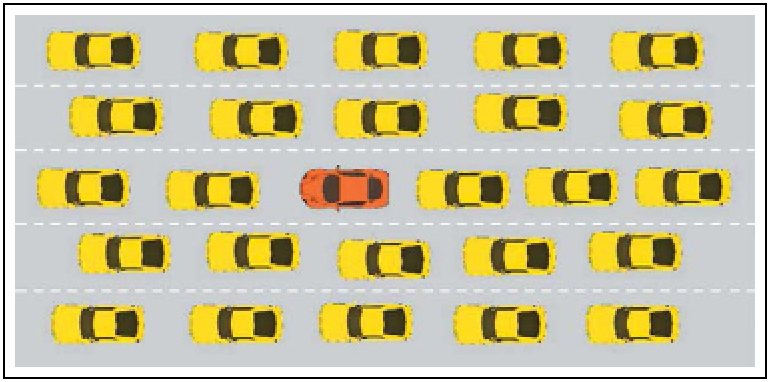
圖1、自動駕駛中本地傳感器觀測到的周圍物體對象
對于傳感器共享信息,如果每輛車都發送所檢測到的周圍物體對象的信息,則從系統角度看,會有很多冗余信息被發送出來。為了減少冗余信息的發送,只須一部分車輛發送傳感器共享信息,與周圍的車輛共享這些數據。發送傳感器共享信息的車輛比率應該是頻譜需求研究中需要考慮的重要假設。
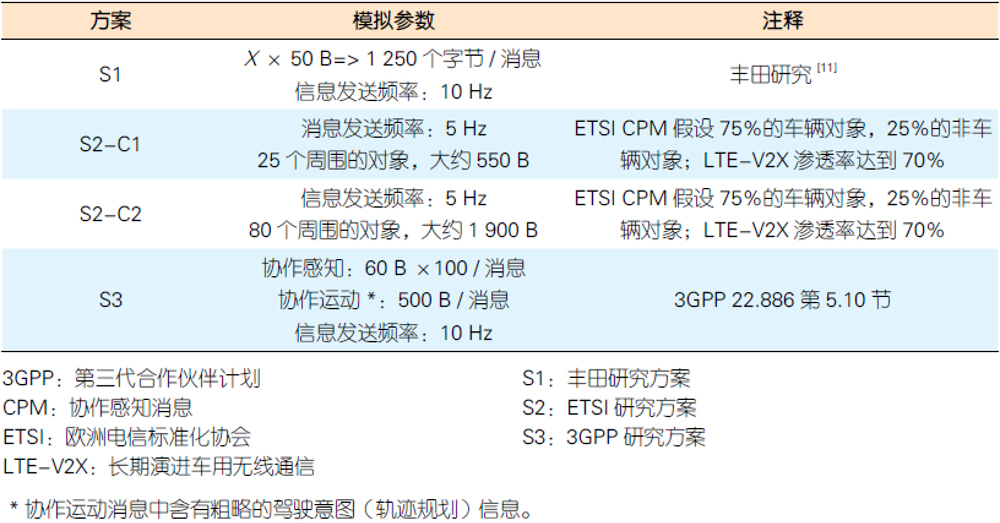
歐洲電信標準化協會(ETSI)制訂了集體感知服務[17-18]的技術報告和規范。對于ESTI 協作感知消息(CPM)流量模型進行建模,由于周圍感知對象數量不同,CPM 數據包大小約為550~1 900 B[16]。
以下是由3GPP 技術規范給出的采用信息共享應用的部分自動駕駛的另一示例。用于部分自動駕駛的3GPP流量模型的有效載荷大小是6 500 B,對應于3GPP TS22.186[12] 中V2V 高級駕駛用例[R 5.3-002] 的消息大小。根據文獻[11-12],該消息大小假設60 B ,并且有效載荷包括100 個對象的信息。感知100 個對象需要非常強大的傳感器能力,且空口將存在大量信息冗余。此時,傳感器共享的有效載荷大小為6 000 B,另外500 B 將用于粗略駕駛意圖分享。
2.2 組播模式
組播通信是5G NR-V2X 最重要的功能之一,該模式用于支持群組內的特定交互消息,通常要求很高可靠性,如群組協商、群組決策、反饋消息等;因此NR-V2X 的組播模式引入了混合自動重傳請求(H-ARQ)[19],保證群組通信所要求的高可靠和低時延。5GAA 針對包括部分群組通信在內的用例和需求進行了研究[13-14]。參考5GAA 對群組通信用例及其消息流的研究[13],我們提出了組播的一般消息流,如圖2 所示。圖2 反映了組播過程和群組通信中交互的一般流程,其中通用的消息流建模是業務建模和頻譜需求研究的基礎。
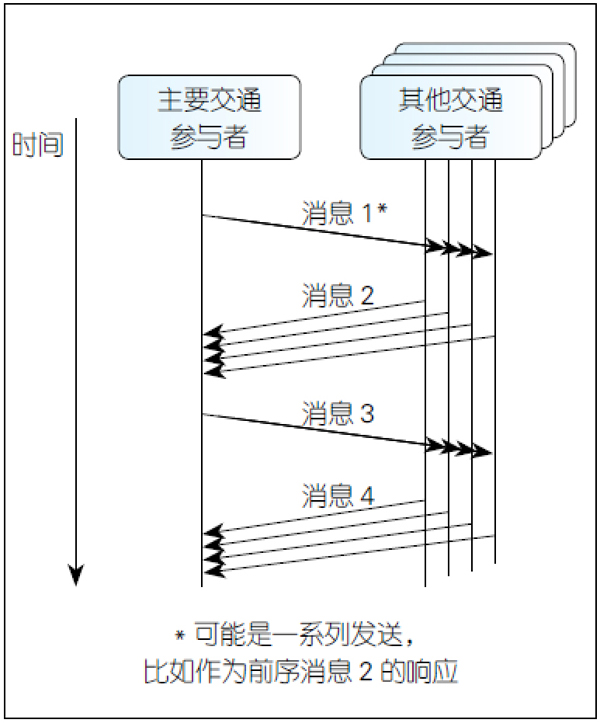
圖2、常規組播消息流的示意圖
3、評估結果
3.1 廣播模式
在2.1 節中,我們總結了廣播模式下協作感知應用3 種業務建模方案,分別為豐田研究方案(以下編號為S1)、ETSI 研究方案(以下編號為S2)和3GPP 研究方案(以下編號為S3)。
表1、總結了協作感知(傳感器共享)的業務模型參數。
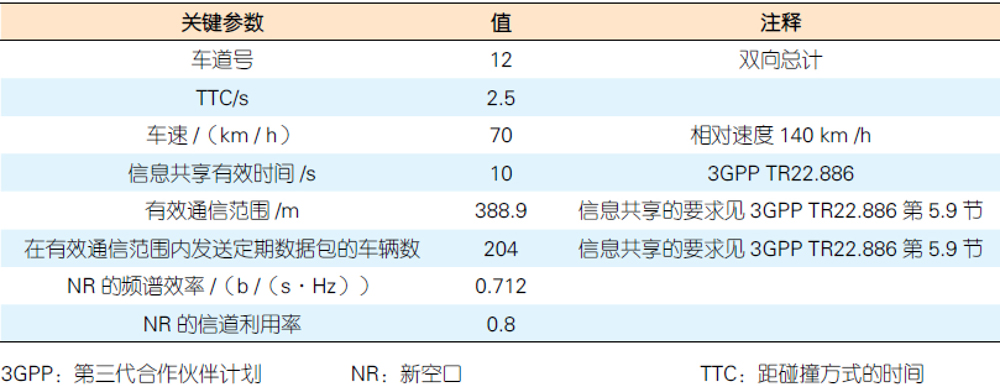
我們以70 km / h 的車速為例來計算傳感器共享的頻譜需求,表2 給出了用于計算的關鍵參數的摘要。
表2、廣播模式傳感器共享的關鍵參數
針對不同的業務量模型S1,S2和S3,我們計算了頻譜需求與激活因子,頻譜需求的計算結果如圖3 所示。
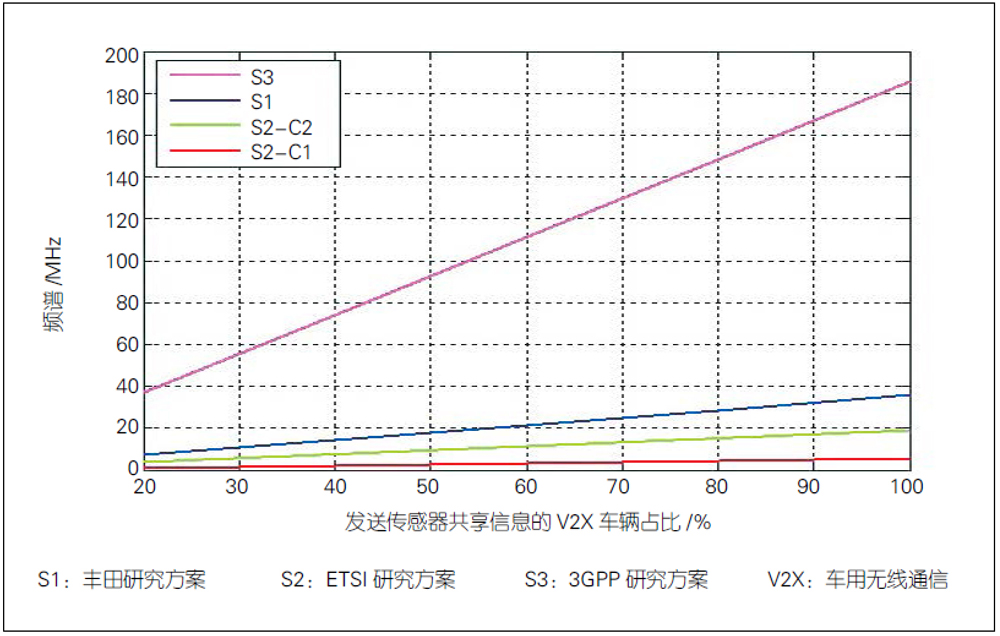
圖3、廣播模式傳感器共享的頻譜需求
在自動駕駛的開始階段,能夠傳輸檢測到的物體的車輛比例可能會很低,協作感知不會消耗太多頻譜,例如可以采用10 MHz 頻譜提供協作感知服務。隨著V2X 車輛提高其檢測物體(即其他道路參與者、障礙物)的能力,消息載荷大小將變大并且無法通過LTE-V2X PC5 接口傳輸。根據上述研究,需為NR-V2X 分配30~40 MHz的新頻譜來承載傳感器共享消息。
3.2 組播模式
基于組播用例的頻譜需求研究方法是首先估算每輛車在組播用例上產生的總業務量,然后計算容納指定范圍內的所有車輛所需的頻譜量。鑒于組播的基本原理也是一種物理層廣播,并且消息像廣播一樣以最大發送功率進行傳輸,我們可以利用2.1 節的頻譜需求研究方法。但是,針對每種用例類型的頻譜需求重復進行分析和計算很耗時,我們因此提出了一種新穎的方法來研究基于組播用例的頻譜需求。鑒于組播和廣播的通用性,即每輛車以最大發送功率向所有近端車輛發送消息,并且具有相似或相同的發射頻譜效率,我們可以比較組播消息產生的所有業務量與基礎安全消息(BSM)消息負載的比率(Ratio_G2B)。組播的頻譜需求與在文獻[2] 中獲得的BSM頻譜數量的比例也是Ratio_G2B。通過這種方式,我們可以快速獲得基于組播用例所需的頻譜數量[5],[8]。
參加群組通信的車輛位于如圖4所示的虛擬組中。在一個組中,有一個主要的交通參與者來領導組播事件的群組通信。
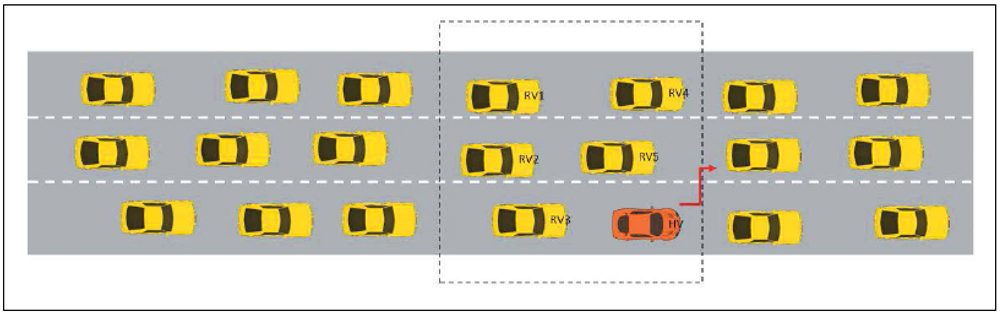
圖4、組播通信的通信范圍圖
文獻[8] 研究了一個組播用例“車道變更事件”的總組播業務量,每個組群的平均業務速率是一次事件內所有發送消息的字節數的總和與平均車道變更間隔時間T_event 之比,具體見圖5 所示。我們假設T_event 為60 s,則該業務量與BSM 業務量之比約為1.5%。隨著協作駕駛策略的廣泛采用,我們期望可以進一步減少變道以提高道路效率。如果T_event 延長為300 s,則總組播業務量與BSM 業務量之比為0.3%。同樣,我們可以評估車道變更事件的總組播業務量與傳感器共享總業務量的比率,如圖6 所示。假設根據豐田汽車研究的流量模型,傳感器共享消息的大小為1 250 B,發送頻率為10 Hz。我們同樣可以發現在實際道路環境中與共享傳感器業務量相比,車道變更組播業務量是微不足道的。綜上所述,與真實道路環境中的廣播業務量相比,車道變更的組播業務量可以忽略不計。
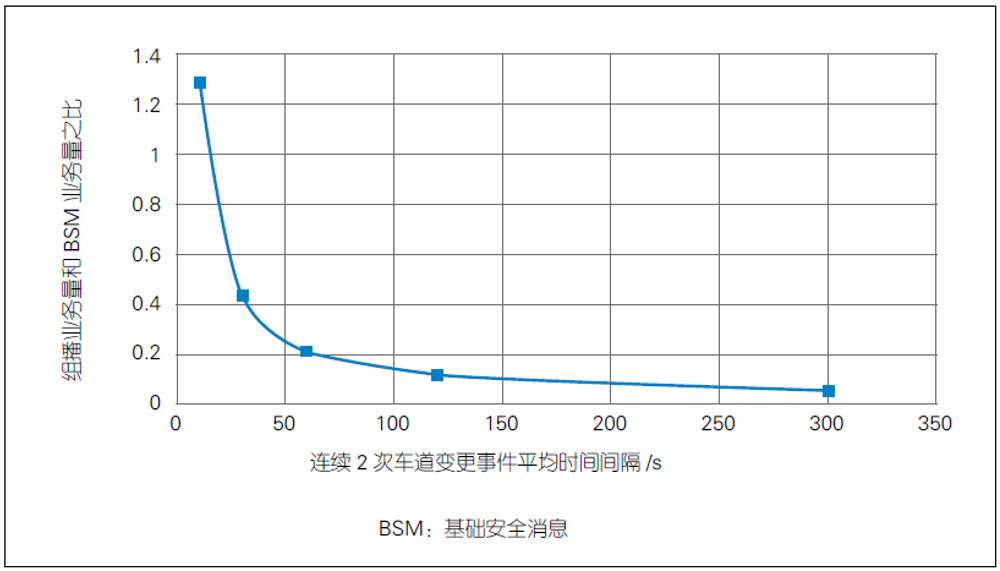
圖5、車道變更的業務量與BSM 業務量之比
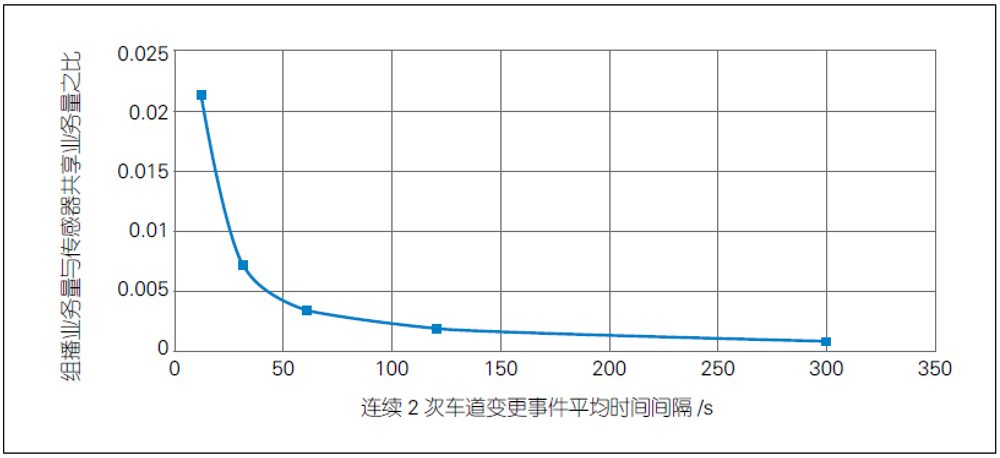
圖6、車道變更的業務量與傳感器共享業務量之比
4、結束語
在NR-V2X 系統中,可以用廣播模式發送承載狀態信息和環境信息的消息(如傳感器共享消息)。這些消息將消耗主要的頻譜資源,研究表明需要至少約30~40 MHz 的頻譜。NRV2X采用組播模式發送群組通信中的協商和決策消息。根據對某些基于組播的用例研究,我們注意到這些組播應用始終是事件觸發的,并且事件發生概率通常較低;因此,盡管組播模式對于支持高級應用更為關鍵,但通過組播模式傳輸的總業務量遠遠少于廣播消息的總業務量。如果與廣播消息相比,組播的業務量微不足道,組播所需的頻譜相對于BSM 和協作感知等廣播類消息所需的頻譜而言可以忽略。在進行NR-V2X 頻率研究的初期可以暫不考慮組播模式的頻率需求。根據目前研究,我們可以得出以下結論:至少需要40 MHz 頻譜來支持不同傳感器融合、路徑規劃算法以及群組通信,用以支持即將到來的自動駕駛。
5.9 GHz 作為國際電信聯盟無線電通信部門(ITU-R)全球范圍以及區域性融合的智能交通系統(ITS)頻譜[20], 可以為C-V2X 和相關ITS 業務發展帶來規模經濟效益。在5.9 GHz中除了分配用于LTE-V2X 提供基礎安全業務的20 MHz 頻率,應額外至少預留40 MHz 用于5G NR-V2X 直連通信(廣播模式、組播模式以及單播模式),以支持近期部署的自動駕駛技術。
致謝
本研究得到FuTURE&TIAA 車聯網聯合工作組成員單位的支持,對他們謹致謝意!
參考文獻
[1] 智能交通車車/ 車路主動安全應用的頻率需求和相關干擾共存研究: CCSA SR 239-2018 [S]. CCSA, 2018[2] Study of Spectrum Needs for Safety Related Intelligent Transportatio Systems-Day 1 and advanced Use Cases: 5GAA S-190179 [S]. 5GAA, 2019
[3] New SID: Study on NR-V2X: 3GPP RP-181429[S]. 3GPP, 2018
[4] GAO L, LI Y, MISENER J, et al. C-V2X Based Basic Safety Related ITS Spectrum Requirement Analysis[C]//2017 IEEE 86th Vehicular Technology Conference (VTC-Fall). USA: IEEE, 2017
[5] 自動駕駛5G NR-V2X 直連通信頻譜需求V2.0[R]. 未來移動通信論壇, 2019
[6] 李儼. 5G 與車聯網[M]. 北京: 電子工業出版社, 2019
[7] 5GAA. Study of Spectrum Needs for Safety Related Intelligent Transportation Systems: 5GAA_S-180026[S]. 5GAA, 2018
[8] 5G NR-V2X PC5 Spectrum Needs Study: Methodology for Groupcast: 5GAA S-190215 [S]. 5GAA, 2019
[9] Study of Spectrum Needs for Safety Related Intelligent Transportation Systems: 5GAA_S-180026[S]. 5GAA, 2018
[10] Service Requirements for V2X Services: 3GPP TS 22.185v14.0.0[S]. 3GPP, 2015
[11] Study on enhancement of 3GPP Support for 5G V2X Services: 3GPP TR22.886V15.0.0[S]. 3GPP, 2016
[12] Enhancement of 3GPP Support for 5G V2X Services; Stage 1: 3GPP TS22.186V15.2.0[S]. 3GPP, 2017
[13] 5G Use Cases and Requirements-Wave 2.1:5GAA TR T-190028[S]. 5GAA, 2019
[14] 5G Use Cases and Requirements-Wave 2.2::5GAA TR T-19099[S]. 5GAA, 2019
[15] BANSAL G. The Role and Design of V2X Communications for Automated Driving[R]. Toyota, 2016
[16] 5G NR-V2X PC5 Spectrum Needs Study: 5GAA S-190017 [S]. 5GAA, 2019
[17] Intelligent Transport Service; Vehicular Communications; Basic Set of Applications; Informative Report for the Collective Perception Service: ETSI TR 103 562 V0.0.14[S]. ETSI, 2018
[18] Intelligent Transport Service; Vehicular Communications; Basic Set of Applications; Specification of the Collective Perception Service: ETSI TS 103 324 V<0.0.12>[S]. ETSI, 2017 [19] Physical Layer Procedures for Sidelink: 3GPP R1-1907274 [S]. 3GPP, 2019
[20] Harmonization of Frequency Bands for Intelligent Transport Systems in the Mobile Service [EB/OL]. [2020-12-22]. https://www.itu.int/md/R15-SG05-C-0120
 粵公網安備 44030902003195號
粵公網安備 44030902003195號