1、引言
海洋面積占據(jù)著地球總面積的71.8%,因此如何在海上通信是人們很自然就會(huì)提出的問(wèn)題。原始的海上通信方式包括烽火、信號(hào)彈、旗語(yǔ)等,到了電氣信息時(shí)代,產(chǎn)生了現(xiàn)代化的通信手段。現(xiàn)在的海上通信包括水上通信和水下通信兩種形式。由于海上通信主要是船艦、潛艇等移動(dòng)物體之間的通信,因此主要是無(wú)線通信,不考慮有線通信。而水上無(wú)線通信環(huán)境完全相似與陸地的無(wú)線通信環(huán)境,因此完全可以使用無(wú)線電通信系統(tǒng)。但水下無(wú)線通信卻不能再使用無(wú)線電通信系統(tǒng),這是因?yàn)殡姶挪ㄔ谒@種介質(zhì)中衰落特別嚴(yán)重,導(dǎo)致無(wú)線電通信系統(tǒng)根本無(wú)法在水下應(yīng)用。后來(lái)人們發(fā)現(xiàn)聲波這種信號(hào)在水中的傳播距離可以達(dá)到通信的要求,因此就催生出了水下聲波通信技術(shù)。
作為一個(gè)通信系統(tǒng),水下聲波通信技術(shù)具有通信系統(tǒng)的一般結(jié)構(gòu),因此跟無(wú)線電通信系統(tǒng)相比,它們的唯一區(qū)別就是通信所使用的波的種類不同,無(wú)線電通信系統(tǒng)使用電磁波實(shí)現(xiàn)通信,而水聲通信系統(tǒng)使用聲波實(shí)現(xiàn)通信。無(wú)線電通信系統(tǒng)使用天線發(fā)送和接收電磁波,水聲通信系統(tǒng)使用換能器在發(fā)送端將電信號(hào)轉(zhuǎn)換成聲波信號(hào),在接收端將聲波信號(hào)轉(zhuǎn)換成電信號(hào)。水聲通信系統(tǒng)如圖1所示。
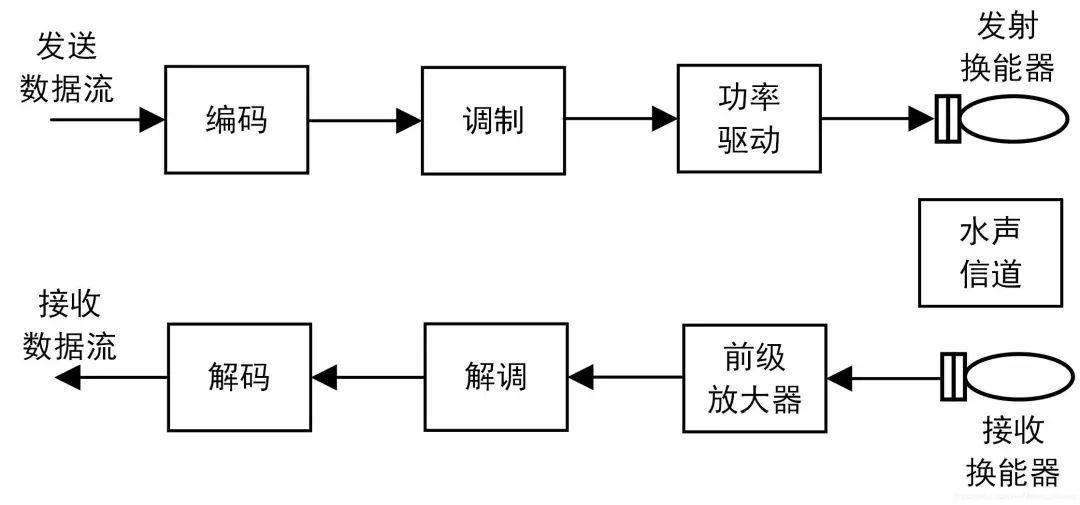
?圖1 水聲通信系統(tǒng)
2、水聲通信技術(shù)的發(fā)展概述
1914年英國(guó)海軍部隊(duì)將研制成功的水聲電報(bào)系統(tǒng)安裝在巡洋艦上,這可以看做是水聲通信技術(shù)的開(kāi)端。第二次世界大戰(zhàn)后的1945年,美國(guó)海軍將研制的水下電話應(yīng)用在潛艇之間的通信上[1]。到了20世紀(jì)70年代,隨著軍事和民用對(duì)水聲通信技術(shù)需求的提高,并且電子信息技術(shù)也迅速發(fā)展,數(shù)字調(diào)制技術(shù)開(kāi)始應(yīng)用在水聲通信系統(tǒng)中,而在此之前水聲通信系統(tǒng)主要使用模擬調(diào)制技術(shù)。數(shù)字通信技術(shù)的優(yōu)點(diǎn)提高了水聲通信系統(tǒng)的傳輸速率和可靠性。
20世紀(jì)90年代至今,數(shù)字信號(hào)處理技術(shù)不斷發(fā)展,一些新技術(shù)也應(yīng)用在水聲通信系統(tǒng)中,包括空間分集、碼分多址、擴(kuò)頻技術(shù)、水下多載波調(diào)制技術(shù)、多輸入多輸出技術(shù)、水下通信網(wǎng)絡(luò)技術(shù)等。因此水下通信技術(shù)已經(jīng)開(kāi)始從點(diǎn)對(duì)點(diǎn)的物理層通信,往多個(gè)節(jié)點(diǎn)之間數(shù)據(jù)交換的網(wǎng)絡(luò)通信方向發(fā)展。
水聲通信技術(shù)從最初應(yīng)用于軍事領(lǐng)域,提供水下目標(biāo)的探測(cè)、定位和識(shí)別等服務(wù),發(fā)展到提供通信、導(dǎo)航等服務(wù)階段。隨著人類海洋活動(dòng)的增加和對(duì)海洋資源利用程度的提高,水聲通信技術(shù)開(kāi)始應(yīng)用于民用領(lǐng)域,為海上科學(xué)考察、水下資源探測(cè)等人類活動(dòng)提供服務(wù)。也正是這些軍事和民用需求推動(dòng)了水下通信技術(shù)的發(fā)展,讓水下通信技術(shù)朝著更完善、更全面的立體和智能方向發(fā)展。
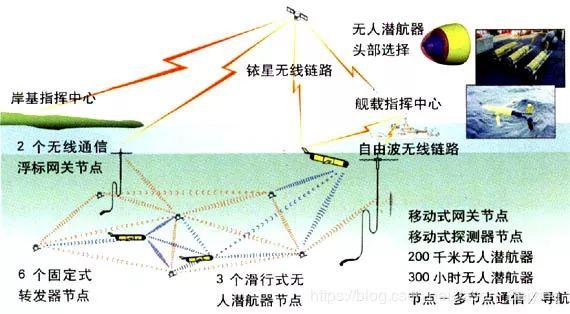
?圖2 立體化水聲通信系統(tǒng)
3、水聲通信技術(shù)的特點(diǎn)
水聲信號(hào)傳播的信道包括水體、海面和海底,而水聲通信技術(shù)的特點(diǎn)主要是由水聲信道的特性決定的。水聲信道是隨參信道,其特性參數(shù)隨著空、時(shí)、頻的變化而隨機(jī)變化,水聲信道模型如圖3所示。
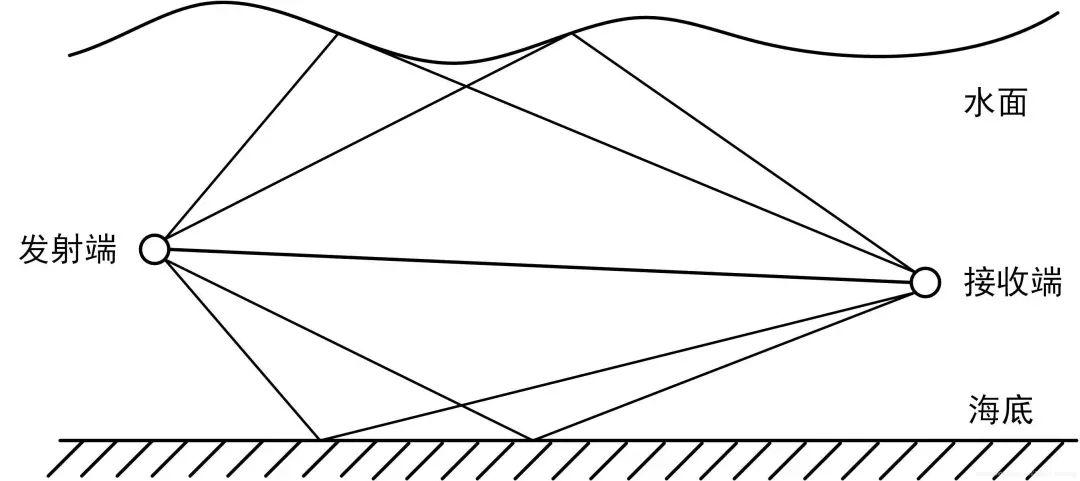
?圖3 水聲信道模型
水聲信道的特性主要包括以下幾點(diǎn)。
(1)起伏效應(yīng)。由于海面的隨機(jī)運(yùn)動(dòng)、海底的隨機(jī)不平整、水體的非均勻性,因此信道不僅在空間上分布不均勻,而且是隨機(jī)時(shí)變的,水聲信號(hào)在這樣的信道中傳播也是隨機(jī)起伏的。
(2)時(shí)變效應(yīng)。由于海水中內(nèi)波、水團(tuán)、湍流以及通信目標(biāo)相對(duì)位置的改變等的影響,水聲信道表現(xiàn)出時(shí)變性。并且由于水聲信號(hào)的傳播速度低、通信碼元的周期較長(zhǎng),使得信道的時(shí)變性對(duì)通信的影響更為明顯。
(3)多普勒效應(yīng)。由于接受端與發(fā)射端的相對(duì)運(yùn)動(dòng),使得接受信號(hào)的頻率發(fā)生變化。除了通信設(shè)備的相對(duì)運(yùn)動(dòng)外,起伏的海面、不平整的海底對(duì)水聲信號(hào)的反射,水中湍流對(duì)水聲信號(hào)的折射等也會(huì)引入多普勒頻移,使得接收端的多普勒頻移不是單一的,而造成多普勒頻移擴(kuò)散。由于水聲信號(hào)的傳播速度低,使得同樣運(yùn)動(dòng)速度時(shí)水聲通信中多普勒效應(yīng)比無(wú)線電通信中嚴(yán)重十萬(wàn)倍[2]。
對(duì)于接近或離開(kāi)目標(biāo),多普勒頻移的表達(dá)式如下
?度相比于無(wú)線電波速度很小,因此多普勒頻移很小可以忽略。而在水聲通信系統(tǒng)中,聲波速度和目標(biāo)速度可比,所以多普勒頻移就不可以忽略。
(4)多徑效應(yīng)。發(fā)射端發(fā)射的水聲信號(hào)會(huì)沿著不同的路徑傳播,接收端將先后接收到同一信號(hào)經(jīng)過(guò)不同路徑到達(dá)的多個(gè)信號(hào)。在不同深度的水體中,多徑效應(yīng)的時(shí)延也不同,在深海信道中時(shí)延可達(dá)幾秒,在淺海信道中時(shí)延也有幾十毫秒。多徑效應(yīng)還與發(fā)射端與接收端的相對(duì)位置有關(guān),以海底平面為參考,垂直信道的多徑效應(yīng)弱,水平信道的多徑效應(yīng)強(qiáng)。多徑信道會(huì)使水聲信號(hào)出現(xiàn)拖尾,影響下一碼元的幅值而造成碼間串?dāng)_,多徑信道還有頻率選擇性衰落的特性,是無(wú)線通信系統(tǒng)面臨的最嚴(yán)峻的問(wèn)題。
(5)環(huán)境噪聲。海洋中存在許多噪聲源,包括海面波浪、生物等引起的自然噪聲和行船、工業(yè)等引起的人工噪聲,這些不同的噪聲具有不同的噪聲級(jí)、占據(jù)不同的頻率,對(duì)水聲信號(hào)造成不同程度的影響。
(6)信道帶寬小。由于海水對(duì)聲波信號(hào)的吸收衰減隨頻率指數(shù)上升,這就導(dǎo)致水聲信號(hào)只能使用低頻信號(hào),因此通信速率也比較低。另一方面,由于換能器帶寬的限制,水聲通信主要使用低頻信號(hào)。
由于水聲信道的這些特性,使得水聲通信技術(shù)具有傳播速率低、時(shí)延大、誤碼率高、可靠性低、帶寬有限、功耗高,體積大等特點(diǎn)。
4、水聲通信技術(shù)的研究進(jìn)展
4.1 非相干水聲通信技術(shù)
20世紀(jì)70年代后,數(shù)字調(diào)制逐漸取代模擬調(diào)制,成為水聲通信技術(shù)主要的調(diào)制方式。非相干通信技術(shù)主要是利用鍵控的方式進(jìn)行調(diào)制,由于頻移鍵控(FSK)調(diào)制技術(shù)的通信數(shù)據(jù)可靠性較高,因此最為常用[3]。1981年美國(guó)麻省理工大學(xué)和伍茲霍爾海洋研究聯(lián)合開(kāi)發(fā)的水聲通信系統(tǒng)利用多進(jìn)制頻移鍵控(MFSK)進(jìn)行調(diào)制,在200m左右的距離上實(shí)現(xiàn)了1.2kbps的水聲通信速率。
4.2 相干水聲通信技術(shù)
相干通信技術(shù)主要包括相移鍵控(PSK)、差分相移鍵控(DPSK),其帶寬利用率比非相干通信技術(shù)提高了一個(gè)數(shù)量級(jí)[4]。20世紀(jì)90年代美國(guó)Scripps海洋研究所發(fā)展出了單載波相干通信技術(shù),采用多相移鍵控(MPSK)信號(hào),空間分集、自適應(yīng)均衡器、糾錯(cuò)編碼和多普勒補(bǔ)償?shù)燃夹g(shù)。
4.3 多載波水聲通信技術(shù)
以正交頻分復(fù)用(OFDM)為代表的多載波水聲通信技術(shù)將高速串行信號(hào)轉(zhuǎn)化為低速并行信號(hào),增加了碼元持續(xù)時(shí)間,降低了帶寬,有利于在多徑信道中傳輸。2005年美國(guó)康涅狄格大學(xué)的Shengli Zhou等人提出了補(bǔ)零OFDM水聲通信方案,實(shí)現(xiàn)了2.5km距離22.7kbps的水聲通信速率,且誤碼率低于。
4.4 其他技術(shù)
多輸入多輸出技術(shù)(MIMO)利用信號(hào)在信道中多徑傳播的特性來(lái)實(shí)現(xiàn)高速、可靠、多端通信。由于其具有提高信道容量、抗衰落、降低誤碼率等特點(diǎn)[5],因此這也是當(dāng)前高速率水聲通信技術(shù)的發(fā)展趨勢(shì)之一。
編碼技術(shù)可以提高通信系統(tǒng)的糾錯(cuò)性能,降低通信系統(tǒng)的誤碼率。編碼方式包括RS碼、卷積碼、Turbo碼、低密度奇偶校驗(yàn)(LDPC)碼[6],應(yīng)用在水聲通信系統(tǒng)中可以明顯提高通信質(zhì)量。
擴(kuò)頻技術(shù)信號(hào)所占用的帶寬遠(yuǎn)大于原始信號(hào)帶寬,但其具有抗多徑和抗干擾能力,并且可以在低信噪比的條件下保證通信質(zhì)量,因此也是水聲通信技術(shù)的重要發(fā)展方向。
5、結(jié)語(yǔ)
水聲通信技術(shù)的理論已經(jīng)比較成熟,而在具體實(shí)現(xiàn)中還存在一些問(wèn)題。雖然水聲通信技術(shù)已經(jīng)取得了長(zhǎng)足的進(jìn)展,但要實(shí)現(xiàn)更快的通信速率、更高的通信質(zhì)量、更完善的通信網(wǎng)絡(luò),還需要MIMO技術(shù)、編碼技術(shù)、擴(kuò)頻技術(shù)等技術(shù)的結(jié)合與實(shí)現(xiàn),還有一段路要走。
參考文獻(xiàn)
[1] 翟逢重,宋宏,黃豪彩等. 海洋技術(shù)教程[M]. 浙江:浙江大學(xué)出版社,2012:257-259.
[2] 朱敏,武巖波. 水聲通信技術(shù)進(jìn)展[J]. 中國(guó)科學(xué)院院刊,2019,34(3):289-296.
[3] 佟宏偉. 水聲通信技術(shù)的調(diào)查研究[J]. 科技經(jīng)濟(jì)導(dǎo)刊,2018,26(35):20.
[4] 李鵬. 現(xiàn)代水聲通信技術(shù)發(fā)展探討[J]. 科技創(chuàng)新與應(yīng)用,2018,22:144-145.
[5] 杜慶偉. 無(wú)線通信中的移動(dòng)計(jì)算[M]. 北京:北京航空航天大學(xué)出版社,2016:104.
[6] 王海斌,汪俊,臺(tái)玉朋,張仁和. 水聲通信技術(shù)研究進(jìn)展與技術(shù)水平現(xiàn)狀[J]. 信號(hào)處理,2019,35(9):1441-1449.
————————————————
本文為CSDN博主「Jason_Beiying」的原創(chuàng)文章,遵循 CC 4.0 BY-SA 版權(quán)協(xié)議,轉(zhuǎn)載請(qǐng)附上原文出處鏈接及本聲明。
原文鏈接:https://blog.csdn.net/Jason_Beiying/article/details/102919280
 粵公網(wǎng)安備 44030902003195號(hào)
粵公網(wǎng)安備 44030902003195號(hào)