1 增益自動控制系統框架設計
智能微波開關接收部分對接收到的微波檢波器輸出信號進行前置固定增益(增益約為1)放大以及濾波以后,通過三級程控放大電路放大,將信號幅值放大到要求的范圍,再由后續電路進行解調和處理。放大器級聯模型如圖1所示。
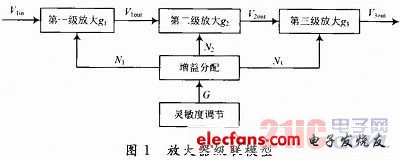
為了適應寬動態范圍的應用,放大器的增益控制必須足夠的靈活。當輸入幅值特別小的時候,放大電路要能夠將小幅值信號放大到要求的范圍內;當輸入幅值特別大的時候,放大電路還應該能夠將大幅值信號壓縮。因此,第一級放大電路的設計最關鍵,要求對信號既可以放大也可以壓縮。而第二級和第三級放大電路僅具有放大能力就可以滿足實際應用要求。
2 增益自動控制電路硬件設計
根據寬動態范圍檢波器輸出信號的特點(輸出信號約為500μV~2.75 V),本文設計的第一級程控增益放大電路要適應如此寬動態范圍信號的放大,同時又能夠濾除噪聲,故采用集成運放、程控數字電位器和電容組成了反相輸入的一階低通濾波電路,同時還具有增益調節功能,微處理器可以通過程序控制此電路的增益。所設計的第一級程控增益放大部分的電路原理圖如圖2所示(其中中R11和R12為程控數字電位器R1)。
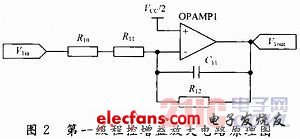
對圖1進行分析,可以得到第一級程控放大電路的輸出電壓為:

在實際電路中,選用的集成放大器為LM6154,它是四路高速低功耗集成運放。選用的數字電位器為MCP4351,它是帶易失性存儲器的8位四路數字電位器。其電阻調節的步長為:
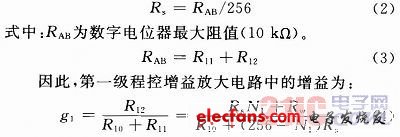
式中:N1為0~256之間的十進制整數;Rw為電位器抽頭阻值(75 Ω)。
經過計算可知:

通過以上分析可以看出,第一級程控增益放大部分不僅可以將信號幅值放大也可以將信號幅值壓縮,使得微波信號幅值始終保持在適當的范圍內。因此需要對程控增益進行設計和控制。
另外,由于R10非常小,且接近于Rw,所以當剛上電時,N1取128(相當于抽頭在中點),近似有g1=1。
第二級程控增益放大部分的電路原理圖#e#第二級程控增益放大部分的電路原理圖如圖3所示(其中R21和R22為程控數字電位器R2)。
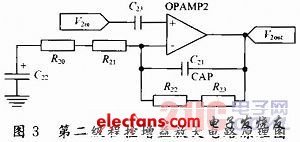
由圖2可以得到第二級程控放大電路的輸出電壓為:

由于第三級放大電路與第二級放大電路的電路形式相同,故第三級程控放大電路增益為:
根據所選數字電位器MCP4351的參數,結合電路的形式,在保證信號不失真的情況下,可以得出程控放大電路各級輸出電壓范圍為:

第一種方法是三級增益同步調節(同大同小),由于各級輸出電壓的限制,導致增益可調范圍變窄。如果同時調的過大,則總增益過大,從而將造成信號幅值太大引起失真;如果調的太小,總增益就變得很小,造成信號難以被檢測出來。
第二種方法是將第一級增益與后兩級增益分開調節。由于第一級增益的變化范圍大,既可以將微波檢波信號放大又可以將其壓縮,所以第一級放大電路在整個三級放大電路中起到關鍵作用。第二級和第三級電路形式完全相同,這兩級放大電路只能將信號幅值放大。因此,在總增益不變的情況下,先調節第二級和第三級增益,當這兩級增益確定后,再根據需要調節第一級增益。
第二級和第三級放大電路的增益公式相同,為了提高調節效率,將第二級和第三級增益進行同步調節,即g3=g2。故總增益為:
因此,只要先確定出g2,就可以很方便地得到g1的值。這種方法有效地解決了第一種方法中存在增益調節范圍小的缺點。
各級增益計算步驟為:
(1)將總增益G線性等分成4 096級(靈敏度A/D采樣位數為12位);
(2)再根據式(13)和式(14)所確定的各級增益范圍,對應每級的G確定出每級g2的值,并根據式(9)確定出第二、三級放大電路數字電位器刀口位置調整值N2和N3;
(3)g2確定后,根據式(16)即可得出每級g1的值,進而根據式(4)計算出第一級放大電路數字電位器刀口位置調整值N1。
3 增益自動控制軟件設計
制作軟件時,將計算好的各級放大器對應的比例值N21,N2和N3做成表存入處理器MSP430F149中,以備調節時由處理程序查找。系統工作時,通過調節靈敏度旋鈕控制總增益G,當靈敏度旋鈕被調到一個值后,MSP430F149讀取靈敏度值得出對應的總增益值,通過查表方式得到各級數字電位器放大比例值N1,N2和N3,并將其輸出給MCP4351的各存儲器,MCP4351再按照存儲器中N1,N2和N3的值調節數字電位器,改變反饋電阻阻值,從而實現增益調控。
4 結論
本文設計的三級級聯放大電路應用于智能微波開關接收部分的增益控制電路,實現了對微波解調信號增益的動態控制。在多級增益分配過程中,局部增益線性分配,其余按照約束方程計算,并形成增益分配表,供CPU查表控制增益。在增益自動控制的放大電路中,硬件電路實現簡便;適用于1~37 234寬動態范圍增益的調節;又由于增益的調節是CPU通過查表方式完成的,節省了系統計算時間,降低了編程難度,整個系統工作效率高。實際應用中能夠滿足工業要求,并取得了理想的效果。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號