0、引言
北斗衛星導航系統(BDS)是中國正在實施的自主發展、獨立運行的全球衛星導航系統,致力于向全球用戶提供高質量的定位、導航、授時服務,并能向有更高要求的授權用戶提供進一步服務,軍用與民用目的兼具。
中國在2003年完成了具有區域導航功能的北斗衛星導航試驗系統,之后開始構建服務全球的北斗衛星導航系統,于2012年起向亞太大部分地區正式提供服務,并計劃至2020年完成全球系統的構建。
北斗衛星導航系統除能夠獲取時間信息和位置信息外,其主要特點是備有短報文通信功能,使得在系統覆蓋區域內的終端用戶可以進行雙向通信,這是其他衛星導航系統所沒有的創新性功能,具備了通信與導航相結合的特色服務。而目前市場上以北斗衛星作為導航系統的商品尚不是很多,特別是民用產品目前還處于起步階段,因此北斗相關應用的巨大潛在市場還有待挖掘和開發。本文提出的基于藍牙模塊的北斗通信便攜式終端亦是在北斗應用市場的一個積極嘗試。
1、北斗終端系統簡介
北斗導航定位系統和其他的導航定位系統一樣,用戶應用終端設備始終是其一個重要組成部分,主要負責完成北斗信息接收,實現用戶特定的應用需求。從衛星導航終端的應用對象來劃分,用戶應用終端通常包括手持式終端、車載式終端、艦載式終端以及嵌入式終端等多種類型,提供實時的導航定位、報文通信和授時業務。其主要組成部分為北斗接收天線、北斗射頻信號處理模塊以及北斗基帶信息解析處理模塊,完成對北斗射頻信號的接收,解調以及數據解析的功能。
北斗衛星通信采用BCD 編碼長報文,每幀報文長度大于200 B/次。通信主要有兩種類型:一種是用戶終端設備向北斗空間終端發出的控制指令;一種是北斗空間終端發送回來的北斗信息數據信息。這些通信數據幀格式如下:

幀頭:控制指令中的幀頭包含同步頭和指令類型,而接收信息數據幀的幀頭則包含同步頭和接收信息類型;幀長:表明數據幀長度;源地址:表明控制指令發送地址或是接收信息接收地址;數據幀內容:包含控制指令通信申請信息或是接收信息幀的信息內容;校驗碼:控制指令數據幀和接收信息幀都采用校驗和的方式對內容進行校驗,即將校驗碼之前的數據異或和,與校驗碼做比較,檢測數據幀的正確性。
2、系統硬件模塊設計
2.1 系統整體設計
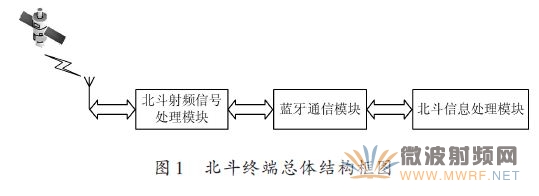
北斗終端系統可分為北斗射頻信號處理模塊和北斗用戶信息解析處理模塊。目前市面上的這兩部分多采用有線方式相連,而北斗射頻信號處理模塊的天線和射頻基帶部分體積較大,若是將此部分與北斗用戶信息解析處理模塊結合在一起,在實際應用中會有諸多不便。針對這一應用現狀,本課題研究的北斗終端在射頻信號處理部分與北斗用戶信息解析處理部分加入了藍牙通信功能模塊,通過藍牙無線傳輸的方式相連,使得北斗用戶信息解析處理模塊體積大大減小,便于用戶攜帶。因此,本論文設計的北斗終端系統由北斗射頻信號處理模塊、北斗用戶信息解析處理模塊以及藍牙通信模塊組成。系統總體結構設計北斗終端總體結構框如圖1所示。
2.2 北斗終端射頻信號處理模塊
北斗終端射頻信號解調接收模塊主要負責接收北斗空間工作站發來的北斗射頻信息,調理和解調輸出。
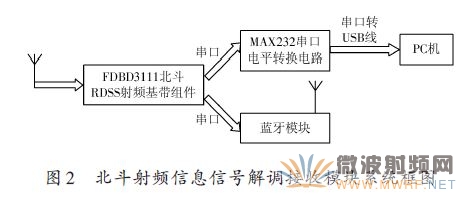
本模塊主要是基于FDBD3111北斗RDSS射頻基帶模塊及其應用電路組成,該模塊集成了LNA低噪放、射頻通道、PA功放和基帶處理四個功能模塊,可接收/發射北斗射頻信號,輸出基帶信號,輸出接口為通用串口接口。
利用該模塊即可將串口Rx輸入的北斗指令信息調制發送出去,又可以將天線接收的北斗信號解調通過串口的Tx 輸出。為便于該模塊的測試,該模塊還加入了基于MAX232芯片的串口電平轉換電路,通過串口轉USB線可連接PC機,使得通過PC機的串口調試助手初步測試模塊電路,本模塊結構如圖2所示。
2.3 藍牙通信模塊
藍牙通信模塊,該模塊帶有串口接口,直接接到FDBD3111 北斗RDSS 射頻基帶模塊串口接口,主要負責將北斗基帶信息轉成藍牙通信傳輸。該模塊采用CSR公司生產的藍牙芯片BC417為主控芯片,采用藍牙V2.0協議標準,工作頻率為2.4 GHz.該芯片帶有串口、USB等接口,可直接將串口或是USB信息轉成藍牙信息發送出去,也能將藍牙接收的信息轉成串口或是USB輸出[4].通過AT指令,可將該藍牙芯片設置成主機模式和從機模式,當芯片處于主機模式時,可直接與從機模式的芯片相連。當芯片處于從機模式時,則可與手機藍牙、電腦藍牙等帶有藍牙功能設備相連,但處于從機模式的芯片之間不能互聯。
2.4 北斗終端用戶信息解析處理模塊
北斗終端用戶信息解析處理模塊,主要負責發送特定的北斗指令和對應的北斗信息。該模塊采用基于ARM Cortex-M3 的STM32F103RBT 嵌入式處理器作為主控芯片,該芯片最高可工作在72 MHz頻率,工作電壓為2.0~3.6 V,擁有GPIO、UART、ADC 等豐富的外設接口,具備優異的實時性能、杰出的功耗控制和良好外設性能等諸多優點,更重要的是ST公司提供了STM32系列處理器固件庫函數,降低了該芯片開發難度,大大縮短了產品開發周期。
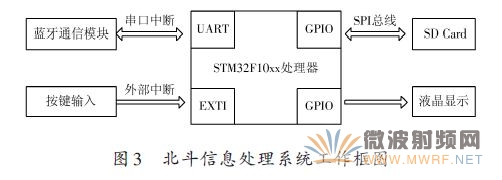
STM32F103RBT 芯片將用戶按鍵外部中斷選擇發送的北斗指令,加上北斗通信的報文幀頭信息,長度信息和校驗信息等,通過藍牙通信模塊傳輸給FDBD3111北斗RDSS射頻基帶模塊調制放大,最后輸送到北斗天線上發送出去;同時,該芯片可讀取并解析藍牙通信模塊接收的北斗用戶信息,最后顯示在TFT液晶屏上,液晶背景圖片存儲在SD Card中。系統工作框圖如圖3所示。
3、北斗終端系統軟件設計
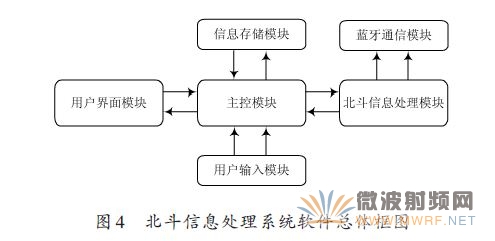
北斗信息處理模塊是北斗終端的核心部分,它將北斗終端的各個組件以及功能模塊貫穿在一起,通過北斗信息處理模塊運行的系統軟件來協同北斗終端的硬件模塊以及軟件功能模塊共同實現北斗終端的各項功能以及協議要求。系統軟件總體框圖如圖4所示。
3.1 藍牙通信模塊
該模塊完成FDBD3111 北斗射頻基帶模塊處理的北斗信息與藍牙通信信息出傳輸的轉換。由于藍牙通信功能模塊式基于CSR藍牙芯片BC417的接口配置,該芯片是集成專用的藍牙芯片,芯片內部已固化了串口或是USB轉藍牙的程序,通過特定指令配置即可設置工作模式、數據發送接收波特率等參數。這種指令叫AT指令,AT即Attention,該指令一般應用于終端設備與PC應用之間的連接與通信。通過PC機上位機軟件發送AT指令,從而對藍牙模塊工作模式及工作參數進行設置。
3.2 北斗信息處理模塊
該模塊是北斗終端軟件的重要組成部分,需要完成發送和接收北斗衛星通信信息。該部分主要是基于STM32F103RBT處理器的嵌入式軟件設計,需要完成硬件驅動的程序設計、北斗信息包的解析處理以及北斗信息顯示界面的設計。
按照北斗通信協議的數據幀格式,可以解析出的北斗數據信息,在STM32 串口中斷函數中實現這一解析的過程,即不斷的判斷接收數據是否與北斗數據幀格式相吻合,通過最后接收到的數據校驗來判斷接收數據幀正確性。其具體實現思想如下:
(1)判斷是否接收到幀頭信息,若是則繼續接收,且已接收字符數加1.
(2)判斷是否接收到與幀頭對應的北斗數據的長度Len,若是則繼續接收,且已接收字符數加1.
(3)接收的都是北斗的信息內容,可直接判斷已接收數據長度是否等于Len-1,若是則說明接收到最后一個校驗信息,則要將前面接收的數據累加,判斷其和是否等于校驗信息;若長度不等于Len-1,則繼續接收。
(4)若接收數據完畢且正確,則將接收成功的標志位置1,然后讀取對應的北斗信息,顯示在液晶屏上。
(5)只要接收數據的幀頭或是長度信息不匹配,或是最終校驗和錯誤,則接收緩沖區都要清除重新接收,對應變量也都清零重新開始計算。
4、結語
我國自主研發的北斗衛星導航系統打破了GPS、GLONASS等衛星導航系統在該領域的壟斷地位,具備了精密授時、快速定位、高可靠導航等優點,而獨有的短信通信功能使其應用更加廣泛。北斗終端作為北斗導航系統的重要組成部分引起了廣泛關注,相信在不久的將來北斗衛星導航會搭配完善的服務,以輕巧好用,實惠便捷的姿態融入老百姓的生活中。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號