華儒科技:全面解析雷達(dá)傳感器技術(shù)
車輛每一側(cè)的監(jiān)控區(qū)域都由一個(gè)后部區(qū)域和一個(gè)側(cè)面區(qū)域組成,如圖所示。后部監(jiān)控區(qū)域從車輛后邊緣開始向后延伸約50 In,相當(dāng)于線段A和B之間的灰色區(qū)域;側(cè)面區(qū)域從車輛后邊緣開始延伸到B柱為止,這正好是線段B和C之間的灰色區(qū)域,灰色區(qū)域的寬度測(cè)得約3.6m
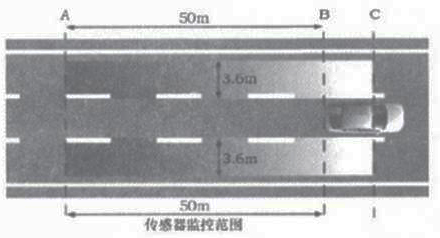
圖1
9、超車與被超車
1)、如圖所示,配備了換道輔助系統(tǒng)(SWA)的汽車(V1)行駛在3車道高速公路的中間一條行車道上,并且正在超越右側(cè)的一輛汽車(v2)。配備了換道輔助系統(tǒng)的汽車與被超車的汽車之間的速度差小于15 km/h。由于速度差較小,超車過程需要一定的時(shí)間,被超越的汽車在一定的時(shí)間內(nèi)消失在“視野盲區(qū)”內(nèi)。在這種情況下,右側(cè)車外后視鏡內(nèi)的報(bào)警燈必須通知駕駛員右側(cè)行車道被占用。如果帶有換道輔助系統(tǒng)車輛的駕駛員現(xiàn)在接通右側(cè)轉(zhuǎn)向信號(hào)燈,那么右側(cè)車外后視鏡內(nèi)的報(bào)警燈將4次閃爍,以警示駕駛員。
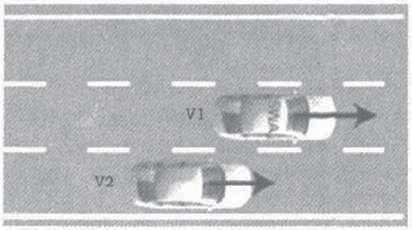
圖2
2)、如圖所示,裝備了換道輔助系統(tǒng)(SWA)的汽車(V3)中速行駛在3車道高速公路的右側(cè)車道上,中間車道上有一輛汽車(V4)以明顯較高速度從后方接近本方車輛。換道輔助系統(tǒng)探測(cè)到這輛不斷靠近的汽車并點(diǎn)亮左側(cè)車外后視鏡內(nèi)的報(bào)警燈。如果此時(shí)操縱左側(cè)的轉(zhuǎn)向信號(hào)燈,那么報(bào)警燈將會(huì)閃爍,以警示駕駛員如果變換行車道將有發(fā)生碰撞的危險(xiǎn)。導(dǎo)致報(bào)警燈被激活的兩車間最大距離取決于兩車間的速度差。速度差越大,此距離范圍越大。但是發(fā)出警示的最大距離極限為50 m,因?yàn)?0 m是雷達(dá)傳感器的最大探測(cè)范圍。
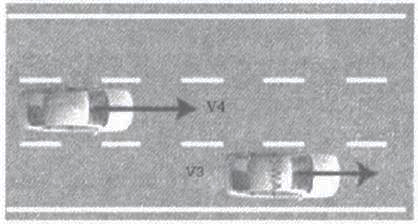
圖3
10、雷達(dá)測(cè)速系統(tǒng)
交通雷達(dá)測(cè)速設(shè)備是一種微波電子測(cè)量儀器,這種測(cè)量設(shè)備是依據(jù)多普勒原理及現(xiàn)代電子技術(shù)為基礎(chǔ)設(shè)計(jì)的一種多普勒測(cè)速雷達(dá),它主要用于公路、鐵路及其他需要測(cè)速限速的場所。
多普勒效應(yīng)是指當(dāng)發(fā)射源和接收者之間有相對(duì)徑向運(yùn)動(dòng)時(shí),接收到的信號(hào)頻率將發(fā)生變化。這種現(xiàn)象最先是被奧地利物理學(xué)家多普勒在1842年發(fā)現(xiàn)的。多普勒提出了“波的頻率和波源與觀察者之間的相對(duì)運(yùn)動(dòng)有關(guān)”的理論,稱之為多普勒原理。應(yīng)用到雷達(dá)電磁波上,當(dāng)雷達(dá)的電磁波在行進(jìn)的過程中碰到物體時(shí),該雷達(dá)波會(huì)被反彈,而且其反彈回來的波,其頻率及振幅都會(huì)隨著所碰到的物體的移動(dòng)狀態(tài)而改變。若雷達(dá)波所碰到的物體是固定不動(dòng)的,那么所反彈回來的雷達(dá)波其頻率是不會(huì)改變的。
11、雷達(dá)測(cè)速傳感器優(yōu)點(diǎn)
傳統(tǒng)的測(cè)速大多以旋轉(zhuǎn)式運(yùn)動(dòng)速度測(cè)量和直線運(yùn)動(dòng)速度測(cè)量,但現(xiàn)實(shí)工業(yè)自動(dòng)化中有不少非規(guī)律性的測(cè)速,比如運(yùn)動(dòng)員運(yùn)動(dòng)測(cè)速,交通車輛測(cè)速,高爾夫球速測(cè)量等情況下,雷達(dá)測(cè)速傳感器可以滿足這些要求。
12、倒車?yán)走_(dá)
倒車?yán)走_(dá)是一種安裝在汽車前、后保險(xiǎn)杠上的電子偵測(cè)系統(tǒng)。采用超聲波檢測(cè)技術(shù)。當(dāng)駕駛汽車前進(jìn)或倒退以及在狹窄的車位泊車時(shí),通過聲音和提示可知車后是否有不明障礙物距離遠(yuǎn)近,從而輔導(dǎo)駕駛員安全,輕松地倒車,避免碰撞。
 粵公網(wǎng)安備 44030902003195號(hào)
粵公網(wǎng)安備 44030902003195號(hào)