激光雷達(dá)是集激光、全球定位系統(tǒng)(GPS)和慣性導(dǎo)航系統(tǒng)(INS)三種技術(shù)于一體的系統(tǒng),可以獲得數(shù)據(jù)并生成精確的DEM(數(shù)字高程模型)。激光雷達(dá)的廠商目前分為兩大陣營(yíng):以美國(guó)Velodyne為代表的純硬件激光雷達(dá)提供商,不提供算法產(chǎn)品,只向車企輸出原始數(shù)據(jù);以及以德國(guó)IBEO為代表的提供包括硬件和軟件在內(nèi)的整套自動(dòng)駕駛解決方案的供應(yīng)商。目前由于價(jià)格比較高昂的原因,激光雷達(dá)還無(wú)法在ADAS領(lǐng)域做到產(chǎn)業(yè)化的階段,但因?yàn)榧す饫走_(dá)精度高、反應(yīng)時(shí)間快、不受雜波影響等特性,隨著技術(shù)的發(fā)展使得價(jià)格逐步降下來(lái),未來(lái)對(duì)準(zhǔn)確率及精度要求非常之高的無(wú)人駕駛領(lǐng)域必然更傾向于大規(guī)模使用激光雷達(dá)傳感器。
谷歌公司的無(wú)人汽車中使用了Velodyne公司的三維激光雷達(dá)HDL-32E,對(duì)于其如何實(shí)現(xiàn)障礙物智能感知,已在該公司的專利文獻(xiàn)中公開(美國(guó)發(fā)明專利申請(qǐng)公開號(hào):US20110216304A1)。
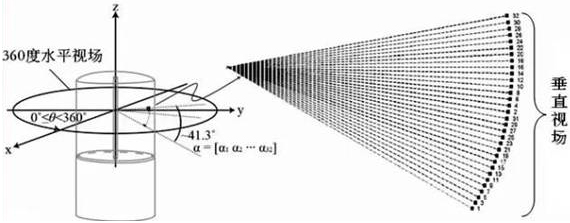
該雷達(dá)頭部?jī)?nèi)具有32個(gè)激光發(fā)射器,被照射目標(biāo)物反射后被32個(gè)激光探測(cè)器接收,同時(shí)位于底部的電機(jī)帶動(dòng)頭部360旋轉(zhuǎn),從而實(shí)現(xiàn)垂直41度,水平360度的視場(chǎng)檢測(cè)。激光陣列技術(shù)將反射信號(hào)每秒處理成70萬(wàn)個(gè)點(diǎn)云(Point Cloud)點(diǎn)。因此要最終實(shí)現(xiàn)無(wú)人駕駛汽車的遠(yuǎn)大理想,降低激光雷達(dá)成本,絕對(duì)是其中關(guān)鍵。
在激光雷達(dá)市場(chǎng)化不斷深入的背景下,除了前面介紹的Velodyne公司,一些初創(chuàng)公司也進(jìn)入本領(lǐng)域并展現(xiàn)了一定的技術(shù)實(shí)力。例如:美國(guó)Quanergy公司、德國(guó)Ibeo公司、以色列Innoviz公司、加拿大LeddarTech公司、英國(guó)Photonic Vision公司。在小型化、固態(tài)化和降成本的方面,上述公司甚至給出了不同于Velodyne公司的解決方案,成為該公司的挑戰(zhàn)者甚至顛覆者。
其中,內(nèi)部無(wú)機(jī)械旋轉(zhuǎn)部件的固態(tài)激光雷達(dá)已經(jīng)成為了新型激光雷達(dá)的一個(gè)重要發(fā)展方向。例如:美國(guó)Quanergy公司的S3雷達(dá),以及專利文獻(xiàn)中記載的(美國(guó)發(fā)明專利公開號(hào):US20150293224A1)相控陣固態(tài)激光雷達(dá)等,這些都是典型的固態(tài)激光雷達(dá)。
當(dāng)前,美國(guó)Quanergy公司發(fā)布的固態(tài)激光雷達(dá)三代產(chǎn)品價(jià)格已經(jīng)可以控制在100美元以下,其尺寸大小僅相當(dāng)于我們?nèi)粘J褂玫膇Phone6plus手機(jī)的八分之一。隨著技術(shù)的成熟和成本的下降,激光雷達(dá)逐漸滲透到了消費(fèi)級(jí)市場(chǎng)。現(xiàn)在除了在自動(dòng)駕駛汽車領(lǐng)域,其主要應(yīng)用場(chǎng)景還包括:機(jī)器人領(lǐng)域、機(jī)器人領(lǐng)域等。
參考文獻(xiàn):
US20110216304US20150293224
 粵公網(wǎng)安備 44030902003195號(hào)
粵公網(wǎng)安備 44030902003195號(hào)