簡介
如今,無線系統無處不在,無線設備和服務的數量持續增長。設計完整的RF系統是一項跨學科設計挑戰,模擬RF前端是其中最關鍵的部分。然而,AD9361等集成RF收發器的推出顯著減少了此類設計的RF挑戰。這些收發器可為模擬RF信號鏈提供數字接口,允許輕松集成到ASIC或FPGA,進行基帶處理。基帶處理器(BBP)允許在終端應用和收發器設備之間的數字域中處理用戶數據。此外,使用Simulink等系統建模工具可以輕松完成基帶處理器設計。然而,新手用戶可能會發現難以理解和解決這個通信系統難題。本文嘗試為無線傳輸通信系統設計和實施簡單的RF基帶處理器。設計使用AD9361 FPGA參考設計框架,在AD-FMCOMMS2-EBZ和Xilinx® ZC706平臺上實施。
本文第一部分詳細描述該基帶處理器的一般設計原則。該部分主要是BBP的理論介紹。在第二部分,使用ADI公司的AD9361FPGA參考設計討論BBP的實際硬件實施。值得注意的是,主要設計目標是使設計盡可能簡單,并在實驗室環境中演示快速無線數據傳輸。在使用和干擾RF頻譜時,須考慮到法規及其他影響。
基本設計
典型的RF系統如圖1所示,直接RF系統除外。該圖1僅顯示了單個數據路徑,反方向是該數據路徑的鏡像圖像。本文中提出的相關基帶處理器允許對數據進行處理,以使其在兩個RF系統之間進行無線傳輸。下文討論了基本設計要求。
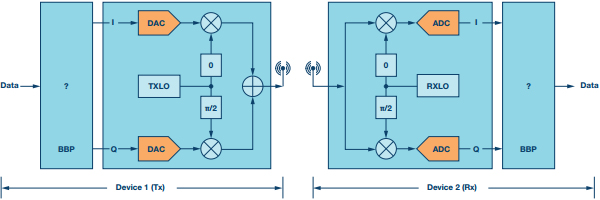
圖1. RF系統框圖
在兩個正交信號I&Q上重復數據
注意,載波相互獨立且彼此不同步。因此,發射和接收載波之間存在相位和頻率偏移。這將對接收器的解調產生不利影響。一個重要問題是信號反轉,正交信號可能會反轉其作用,因為偏移會定期合并和漂離。克服這種不確定性的簡單方法是在兩個正交信號上重復相同數據。
以串行形式發送和接收數據(按位)
大多數情況下,與BBP連接的RF前端接口是DAC和ADC。這些是模擬信號的數字接口。因此,不能簡單地將數據發送到DAC輸入,并預計在ADC輸出端獲得相同數據。數據以串行形式發射,將單個位數據映射到DAC的全部分辨率。同樣,數據以串行形式接收,從ADC的全部分辨率解映射。這提供了充足的冗余。如果這些是16位轉換器,則接收器將從可能的65536數據集中決定1或0。僅這一點,便可以顯著簡化解碼。
I&Q信號相互正交
RF前端設備(如AD9361)是I/Q收發器。如果輸入是正交信號,這些設備最有效。這些設備通常沿兩個數據路徑進行內部I/Q匹配和校正,以抵消二者之間的任何差異。規則是,實部(I)信號是余弦函數,虛部(Q)信號是正弦函數。
調制方案是BPSK
可以部署信號幅度、頻率或相位調制的所有常見方法。檢測相位差異相對來說更加簡單。由于數據以串行形式傳輸,因此必然會選擇二進制相移鍵控(BPSK)。
位間隔是8個樣本
數據需要時序信息,位間隔。可能的最大位間隔是采樣周期。為了使接收器保持簡單,需要足夠的時間來解碼信號并做出決定。最簡單的時序恢復方法是零交越和峰值檢測。在這種情況下,峰值將不一致。因此,選擇零交越進行位間隔檢測和跟蹤。兩種系統之間也存在載波差異。在某些情況下,在用戶數據的任意端,樣本可能模糊不清。為每半個正弦信號留出4個樣本,位間隔設置為8個樣本。因此,有效的傳輸速率是采樣頻率除以8。
數據沒有直流成分
時序和相對相位恢復以信號的零交越為基礎。因此,單個信號需要不含任何直流成分。此外,要求信號每隔一個位間隔允許至少一個零交越。正弦信號兼具兩者的屬性,并且非常符合上述BPSK調制方案要求。
數據已加擾
用戶數據是任意的很可能是一長串1或0。數據需要加擾,以便在接收器端恢復時序和相位,從而更高效地跟蹤信號。
數據以數據包的形式傳輸
由于系統彼此不同步,因此接收器的信號會存在幅度、頻率和相位誤差。解調信號是發射信號相對于本地載波發生相位變化的信號。載波可能會跟蹤一段時間,選取數據,然后再跟蹤。因此,設計需要做好部分數據丟失的準備。為此,數據以數據包的形式傳輸。可重復傳輸多個數據包,而非整個數據。
使用CRC驗證數據包
數據包攜帶循環冗余校驗(CRC)碼,因此如果存在不匹配,則允許接收器丟包,并請求再次發送。
在每個前同步碼期間完成時序和相位校正
數據包表頭攜帶前同步碼,用于將其從接收到的數據流中劃分出來。此外,接收器使用該前同步碼復位信號的時序和相位信息,以解調數據包數據。
內置性能指標
接收器也支持統計計數器,如接收到的、丟棄的或校正的數據包數量。這些計數器用于衡量和監控性能指標,包括誤碼率和有效數據速率。
總而言之,數據作為數據包以串行形式發送和接收。數據包攜帶前同步碼和CRC。數據在收發器設備前的中間正交信號上經過BPSK調制和解調。因此,中間信號頻率和數據的位速率是采樣速率的八分之一。基帶處理器模塊及上述設計細節如圖2和3所示。
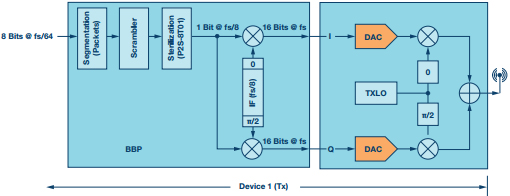
圖2. BBP發送功能框圖
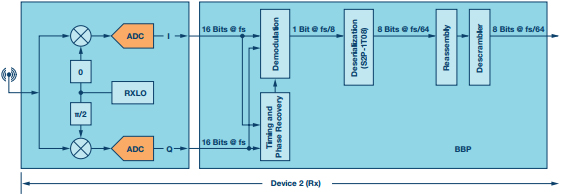
圖3. BBP接收功能框圖
發送器讀取數據字節(字符寬度),并將其轉換為帶有表頭或前同步碼的數據包。將CRC添加到數據包末端。然后,對數據包數據進行加擾和串行處理。在連接到收發器之前,單個位數據相位調制余弦(I)和正弦(Q)函數。
在接收方向,離線模塊恢復并跟蹤時序間隔和調制信號的相對相位。該信息用于從輸入的ADC樣本中恢復串行數據。然后組裝到數據包,并進行解擾。在數據包結束時,比較CRC,如果不匹配,則丟棄數據包。如果CRC匹配,數據傳遞給終端用戶。
實現
BBP設計在硬件中實施和測試。硬件是兩個評估板的組合:具有Zynq FPGA設備的Xilinx ZC706評估板,以及具有AD9361收發器的AD-FMCOMMS3-EBZ評估板。ADI提供支持該硬件的完整參考設計。該開源設計在主要工具版本中免費提供,可獲得完全支持和更新。硬件詳細信息參見下列URL:
ZC706AD-FMCOMMS3-EBZ
Zynq SOC
AD9361
ADI GitHub庫
ZC706和AD-FMCOMMS3-EBZ HDL參考設計
AXI AD9361 IP
ADI參考設計是支持Linux®框架的嵌入式系統。包含圍繞ARM®處理器的各種外設。AD9361設備連接到axi_AD9361 IP外設。它在RF設備和系統存儲器之間傳輸原始采樣數據。外設和設備通過Linux內核驅動程序進行初始化和控制。BBP則作為連接到axi_AD9361的另一個IP外設。出于歷史原因,BBP IP命名為axi_xcomm2ip。Linux中的用戶空間應用程序用于在系統之間控制、發送和接收數據。
在ADI參考設計中,在發送方向,axi_AD9361 IP連接到解包模塊(util_upack),在接收方向,連接到打包模塊(util_cpack)。在發送方向,BBP數據插入解包模塊和AD9361內核之間。為了使其不影響默認數據路徑,BBP支持可選的數據路徑多路復用器,以選擇解包數據源或BBP數據源。BBP允許參考設計數據路徑作為默認路徑,并僅在啟用時選擇BBP數據源。在接收方向,BBP僅連接到AD9361內核。參考設計數據路徑不受影響。這允許框架不受妨礙地引導和設置系統。在系統設置后,啟用BBP,可通過覆蓋默認數據路徑來進行數據傳輸。以ADI參考設計實施的BBP的框圖如圖4所示。
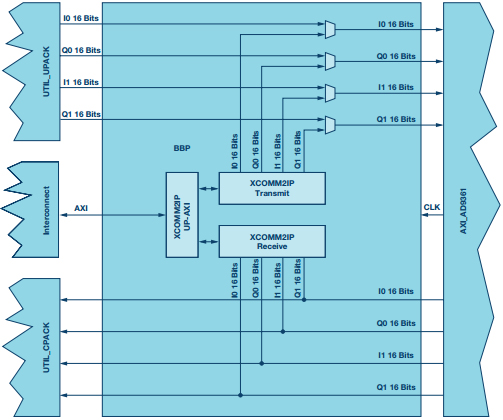
圖4. BBP IP框圖
本文中討論的設計、初始化和數據傳輸使用一對這種硬件。設置僅需一對HDMI®監視器、鍵盤和鼠標及天線。系統彼此完全不同步,但需要相同設置。在每個方向,數據在不同載波上傳輸。設備1的發射載波頻率和設備2的接收載波頻率相同,但在另一個方向上不同。然而,如果回送中使用單個設備,發射和接收載波必須具有相同的頻率。BBP的HDL設計采用ADI庫模塊。
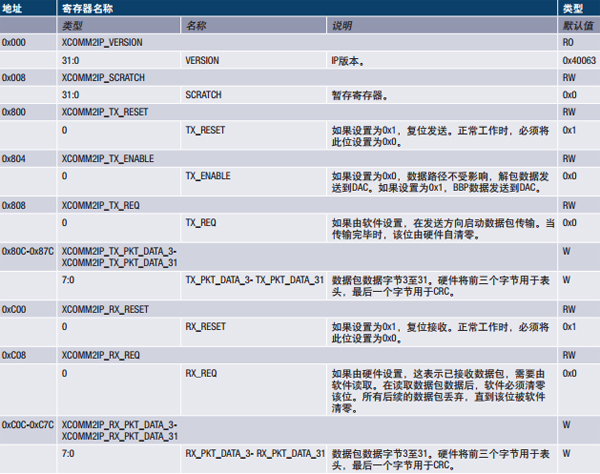
表1. BBP寄存器映射
控制(微處理器)接口
AXI-Lite接口用于通過處理器控制和監控BBP。使用ADI公共庫(hdl/library/common/up_axi.v)中的up_axi模塊,可以輕松推斷該接口模塊。該模塊將AXI-Lite接口轉換為簡單內存,如讀取和寫入總線。和任何其他ADI IP一樣,添加內部寄存器和內存。寄存器映射如表1所示。
up_axi模塊端口及其端口映射如下所述。up_rstn:AXI接口復位(異步低電平有效),連接到s_axi_aresetn。
up_clk:AXI接口時鐘,連接到s_axi_aclk。
up_axi_*:AXI接口信號,連接到等效s_axi_*端口。
up_wreq, up_waddr, up_wdata, up_wack:內部寫入接口,up_wreq信號與地址和數據一同置位,以指示寫入請求。請求需要通過up_wack端口應答。
如下所示,實施簡單的寄存器寫入。
always @(negedge up_rstn or posedge up_clk)begin
if (up_rstn == 0) begin
up_wack up_reg0 end else begin
up_wack if ((up_wreq_s == 1’b1) && (up_waddr == UP_
REG0_ADDRESS)) begin
up_reg0 end
end
end
模塊在二者之間執行地址轉換。AXI接口使用字節地址,但內部總線使用DWORD地址。結果是,up_axi模塊丟棄AXI地址的兩個最低有效位,以生成內部DWORD地址。
up_rreq, up_raddr, up_rdata, up_rack:內部讀取接口,up_rreq信號與地址一同置位,以指示讀取請求。請求需要與讀取數據一同通過up_rack端口應答。
如下所示,實施與上述相同的寄存器用于讀取。
always @(negedge up_rstn or posedge up_clk)begin
if (up_rstn == 0) begin
up_rack up_rdata end else begin
up_rack if ((up_rreq_s == 1’b1) && (up_raddr == UP_
REG0_ADDRESS)) begin
up_rdata end else begin
up_rdata end
end
end
相同地址轉換也適用于讀取。讀取數據僅在請求時驅動,否則設置為零。這是因為up_axi模塊將單個讀取數據從各個地址組傳遞到OR門。因此,未選擇的地址組需要驅動讀取數據零。
如上方寄存器映射表中所列,BBP有三個地址空間。常見寄存器空間映射至0x000、發送(DAC)映射至0x800 (0x200),接收(ADC)映射至0xC00 (0x300)。軟件(Linux用戶空間應用程序)應當將發送數據包數據寫入緩沖器,并從另一個緩沖器中讀取接收到的數據包數據。數據包大小選擇為32字節,帶有3字節前同步碼和1字節CRC。
數據接口
對于接收和發送方向的兩個通道,AD9361接口內核包含兩對16位I/Q數據。內核按照與AD9361數字接口相同的時鐘運行。在2R2T模式下,這是采樣速率的4倍。在1R1T模式下,這是采樣速率的2倍。有效數據速率由有效信號控制。因此在2R2T模式下,每4個時鐘置位一次有效。在1R1T模式下,每2個時鐘置位一次有效。BBP旨在支持2R2T和1R1T模式。它使用單個發送和接收通道。內部邏輯在2R2T和1R1T模式下以采樣速率運行。然后,BBP在其時鐘頻率下,通過接口內核傳輸數據。這樣是為了在BBP內演示時鐘轉換。在許多情況下,用戶可能希望無論收發器的接口速率如何,都能在采樣速率下運行BBP邏輯。
使用Xilinx基元BUFR和BUFG,生成采樣頻率內部時鐘。BUFR是分壓器,BUFG是高扇出時鐘緩沖器。為此,也可以使用MMCM。如下所示,生成內部時鐘。
parameter XCOMM2IP_1T1R_OR_2T2R_N = 0;localparam XCOMM2IP_SCLK_DIVIDE =
(XCOMM2IP_1T1R_OR_2T2R_N == 1) ? “2” : “4”;
BUFR #(.BUFR_DIVIDE(XCOMM2IP_SCLK_DIVIDE))
i_bufr (
.CLR (1’b0),
.CE (1’b1),
.I (clk),
.O (s_clk_s));
BUFG i_bufg (
.I (s_clk_s),
.O (s_clk));
使用BUFR和BUFG可確保時鐘頻率鎖定,但會影響相位確定性。最大相位不確定性是單個接口時鐘周期。通過帶有同步信號的四級寄存器陣列,可以輕松補償該不確定性。然而,設計采用了雙端口RAM模塊來實現數據傳輸。這也是為了展示常見信號處理要求的應用實例。使用ADI庫內存模塊(ad_mem)可以推斷出雙端口RAM元件。
發送接口
在發送方向,處理器將數據包數據寫入緩沖器(參見上方寄存器映射表)。然后,請求硬件發送該數據包。BBP將數據包連續發送給設備。在數據包開始時,檢查是否有任何請求。如果沒有待處理的請求,則發送空閑數據包。如果有請求等待處理,讀取并發送數據包緩沖器。
發送邏輯使用自由運行位計數器,按照位寬運行。當位計數器為0x0時,更新緩沖器讀取地址。由于在數據包傳輸期間可能會隨時出現處理器請求,因此在數據包傳輸開始時會立即捕獲并清零。在數據包傳輸開始時,如果請求等待處理,則應答回至處理器接口。利用請求在緩沖器數據或空閑數據之間進行選擇。

圖5. 發送數據路徑
數據包數據的前兩個字節設置為0xfff0。第三個字節用于表示空閑(0xc5)或數據(0xa6)數據包。CRC字節作為數據包的最后一個字節插入。CRC多項式為x8 + x2 + x + 1。除表頭外的所有字節已加擾。加擾多項式與SONET/SDH (x7 + x6 + 1)相同。
余弦和正弦查找表用于生成調制載波。在8個樣本中,位間隔等于完整的信號周期(0至2)。位數據用于反轉信號。然后,數據寫入小緩沖器,并使用接口時鐘,根據AD9361接口內核中的有效信號讀取。
接收接口
在接收方向,針對表頭模式0xfff0,監控I/Q數據。這種獨特的模式在數據包傳輸中只出現一次。可以發送數據包數據,以使加擾器輸出重復該模式。軟件會限制并阻止該做法。12個連續位間隔的該系列同相數據序列用于通過時序恢復模塊復位并跟蹤接收器時序和相位。因此,將復位其時序計數器并將其相位值設置為0x1。該序列后的第一個反轉被視為0x0。在此之后,時序恢復模塊在整個數據包傳輸過程中保持其狀態不變。
數據恢復模塊計算信號的平均值,并決定信號的當前相位。然后,與時序恢復模塊跟蹤的相對相位進行比較。如果發生沖突,根據過去的信號變化做決定。這是因為沖突通常是由相位切換引起的。
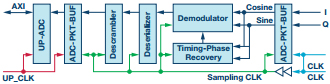
圖6. 接收數據路徑
然后,解調的位數據組裝到字節,并進行解擾。如果傳輸緩沖器為空,則數據寫入傳輸緩沖器。在數據包結束時驗證CRC。如果匹配且傳輸緩沖器已寫入,則通知處理器接口。軟件應當監控該請求,如果已設置,通過讀取其內容來清空緩沖器。然后,必須清除請求,以便繼續進行數據包傳輸。
構建說明和下載
本文介紹簡單RF基帶處理器的理論和實施詳情。討論了在ZC706和AD-FMCOMMS3-EBZ硬件上實現該設計的實際方案。快速演示和構建說明的完整設計文件參見https://wiki.analog.com/resources/fpga/docs/hdl/xcomm2ip 。此頁面也詳細介紹了HDL設計、軟件、RF設置、性能和分析。
作者簡介
Rejeesh Kutty于2011年加入ADI公司,任客戶解決方案支持部門的HDL工程師。他獲得印度科學理工學院的電子工程碩士學位。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號