從定位和鄰近度測量,到確定液面位置和光照強度,傳感器解決方案為我們提供了一個感測、數字化表達和處理周圍世界的途徑。特定的應用問題已經催生出大量不同的傳感器技術,使得系統能夠在各種各樣的條件下,以不同的精度等級來感測周圍情況。隨著近期智能基礎設施的興建,工廠內的工業4.0 (Industry 4.0)、樓宇自動化產品,以及自動駕駛無人機等更新型應用的興起,開發人員正期待傳感器能夠將系統性能和效率提升到全新水平。
設備上配備的毫米波(mmWave) 雷達技術專門用來在短距離(5cm) 到長距離(150m以上)范圍內實現探測功能,這項技術本身可以探測快速運動物體(速度高達300kph)的范圍、速率和運動角度,而它的精度不受周圍光照、下霧、降雨和灰塵的影響。圖1是范圍、速率和運動角度信息的可視化示例。
毫米波傳感器技術在汽車領域非常成功,不過設計人員目前正在解決這項技術擴展至其它市場時所面臨的挑戰,比如說樓宇和工廠自動化應用領域。所遇到的問題是,此前的雷達系統都是分立式設計,導致了復雜的硬件設計和軟件開發,提高了準入門檻。
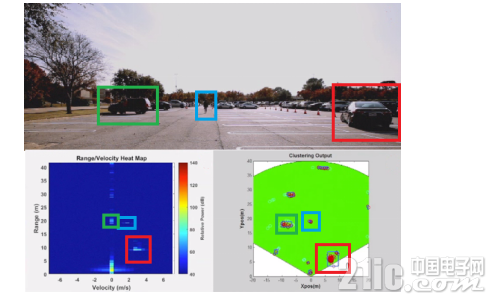
圖1:一個停車場內來自毫米波傳感器的范圍、速率和角度信息:藍色背景圖表是范圍/速率熱圖(在這幅圖中,你可以識別出移動/靜止的物體和它們的速率);綠色背景圖表是范圍/角度可視化圖;彩色方框標出了場景和圖表內移動和靜止的車輛及行人
圖2顯示的是一個分立式毫米波雷達系統。一個雷達信號處理鏈需要多個集成電路(IC) 組件,其中包括一個射頻(RF) 前端和一個數字處理后端。設計分立式雷達系統需要給予特別的關注,并且要考慮多個注意事項,以解決在一塊印刷電路板(PCB) 上發送高速雷達數據的問題,諸如微控制器單元(MCU) 等的中央控制器必須將控制信號按照一定路線發送給這些獨立組件。這些系統對于外部電磁干擾(EMI) 非常敏感,這使它們很難針對特定的“嘈雜”環境和挑戰性更高的室外環境進行設計 。
分立式雷達系統也對軟件設計人員提出了挑戰。主機MCU的配置和控制信號需要發送至每個RF和數字處理組件,以確保系統能夠針對不斷變化的環境條件和應用需求最優地控制每個組件,而這需要大量的軟件設計和開發策略。
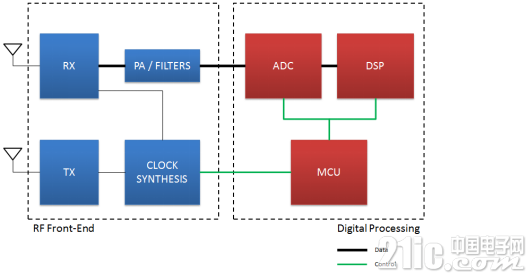
圖2:分立式毫米波雷達系統示例。每個彩色方框代表射頻前端或數字處理后端內的一個獨立IC或一組IC
如圖3所示,TI的單芯片IWR1x 毫米波傳感器產品組合將毫米波雷達射頻技術與強大的ARM® MCU和TI數字信號處理(DSP) 集成在一起,實現了簡單的單芯片解決方案,降低了毫米波感測的準入門檻。借助TI的單芯片10mmx10mm IWR1x傳感器,你不用再去處理分立式前端、模數轉換器和處理器件之間的復雜高速數據和通信走線,也不用處理額外尺寸、功率和支持它們的相關物料清單成本。這個集成度還簡化了軟件設計過程,從而極大簡化了器件配置、監控和校準。
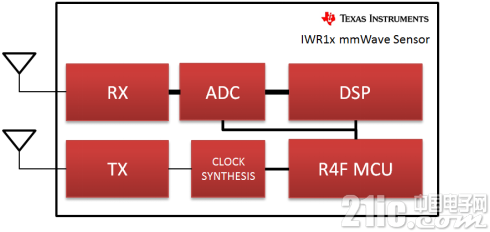
圖3:TI的IWR1x 毫米波傳感器將單芯片毫米波感測所必需的全部組件集成在一起,以簡化硬件和軟件設計。
毫米波對應用的影響
液位感測是工廠內倉儲和測量不同化學品的一個重要部分。由于這些化學品具有腐蝕性或毒性,必須在非直接接觸的情況下測量剩余的液體體積。mmWave感測提供高精度測量值,并且在灰塵、煙霧或極端溫度等環境條件下具有穩健耐用性。IWR1x 射頻前端是高度線性的,其超寬(連續4GHz,5GHz拼接)帶寬可以在深度1m至80m的液罐內實現極精確的亞毫米測量值。針對77GHz級發射器參考設計的功率優化設計給出了如何優化在4-20mA功率受限系統內運行的IWR1443。
交通監控基礎設施的目的在于,通過掌握與車輛和行人有關的特定信息和遙感數據,對路口的情況做出及時應對,并且搜集交通統計數據,以提高運輸效率。毫米波傳感器可以實現對車輛位置和速率的測量,并且能夠探測速率高達300kph、距離在150m和更遠范圍以外的物體。
無人機已被廣泛采用,從愛好者的飛行競技,到大量行業內的商業用途,比如包裹投遞和林業領域應用。為了實現安全性、提高平臺的生產力,設計人員面臨諸多挑戰,包括使無人機能夠探測障礙,并且在最危險的飛行情況下為操作人員提供輔助。無人機要求高速物體探測功能,并且能夠在100m距離內跟蹤大小為數厘米的物體,比如當無人機接近地面或在物體周圍運行時。由于無人機是由電池供電運行的,為了延長飛行時間和提高有效負載,解決方案應尺寸小巧、重量輕。
目前提供的IWR1443BOOST和IWR1642BOOST評估模塊可以輕松評估毫米波雷達技術,并且顯示如何在多種工業感測應用中使用范圍、速率和角度數據。通過使用具有TI提供的mmWave軟件開發套件(SDK) 的評估模塊,你可以運行現成可用的演示程序,或者在幾分鐘內為你的開發定制示例代碼。同時提供的還有示例源代碼,展示了TI高精度毫米波感測和處理的更多使用情況,比如水體與地面之間的分類,以及心率和呼吸頻率的非接觸式測量。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號