隨著移動通信需求的日益增長,允許訪問特定位置信息在普適計算及應用方面表現出廣泛的重要性。在室外環境下,基于全球衛星導航系統(GNSS)的全球定位系統(GPS)或者北斗星定位系統已經可以滿足一定的室外定位需求。然而,這些技術并不能很好的運用在室內定位系統中,必須采用一些替代技術。
為了實現這個目標,基于IEEE802.11無線局域網(Wi-Fi)的技術提供了一個高性價比的解決方案。實際應用中也已經提出了許多算法方案,包括測量接收信噪比(SNR),以及使用更廣泛的接收信號強度指示(RSSI)。室內定位問題必須要考慮室內環境所表現出的傳輸信道特性,由于墻壁和障礙物的影響,會帶來多徑衰弱、吸收以及遮蔽等一系列問題。因此,基于幾何角的測量技術,比如到達角(AOA)、到達相位(POA)、到達時間(TOA)或者到達時間差(TDOA)不能很好的應用在室內定位系統中。
近幾年,隨著射頻識別技術(Radio FrequentlyIdentification,RFID)的不段完善和推廣,并且憑借其重量輕、功耗低和識別能力強等獨特優勢,逐步運用在各種場合中,如身份標識、工程控制和定位追蹤等領域。本文的研究重點是將研究Wi-Fi無線傳輸技術與RFID識別技術相結合,通過RFID標簽來實現Wi-Fi系統定位的解決方案。據初步檢索,國內對基于Wi-Fi的RFID定位技術研究工作尚不多見,本文的工作是將對基于Wi-Fi的RFID定位系統的定位方案進行探討。
1 定位系統的硬件結構
射頻識別技術(RFID)是20世紀90年代起新興的一項自動識別技術,它主要通過標簽對應的唯一ID號識別標志物。與傳感器技術類似,RFID技術被認為是物聯網(The Internetof Things)一項支撐技術。某些人認為,前者只是識別,沒有處理的能力,而后者可以對感知到的物品進行處理。和傳統的磁卡、IC卡相比,射頻卡最大的優點就在于非接觸,因此,識別工作無須人工干預,可工作于各種惡劣環境。RFID技術可識別高速運動物體并可同時識別多個標簽,操作快捷方便。
RFID是一種簡單的無線系統,只有兩個基本器件,該系統用于控制、檢測和跟蹤物體。系統由一個閱讀器和多個標簽組成。
RFID技術利用無線射頻方式在閱讀器和標簽之間進行非接觸雙向傳輸數據,已達到目標識別和數據交換的目的。最基本的RFID系統由三部分組成:電子標簽(Tag)、讀寫器(Reader)和在標簽與讀卡器間傳遞射頻信號的微型天線(Antenna)。
我們下面將要研究的定位測試平臺主要由多個支持RFID讀寫器功能的Wi-Fi接入點和內置有RFID標簽的Wi-Fi終端組成,圖1所示為定位系統的硬件框圖設計。

圖1 系統硬件框圖
2 定位方案
基于Wi-Fi的RFID定位方案我們將考慮采用以下兩種解決方案:(1)基于信號強度和到達時間差復合定位方案;(2)基于位置距離和角度的定位方案。
2 . 1 基于信號強度和到達時間差復合定位方案
對室內Wi-Fi終端進行定位前,首先根據室內實際情況規劃出室內的終端分布圖,存入信息處理數據庫;然后根據室內分布情況設置AP接入點,同時我們需要設置一個位置固定的參考標簽,作為測量基準點來幫助進行位置校準, 設置的接入點數量根據具體的室內情況而定。
當Wi-Fi終端進入室內后,AP接入點內的RFID讀寫器被喚醒,再由讀寫器發出一個無線喚醒信號,喚醒Wi-Fi終端內的RFID標簽。標簽接收到喚醒信號后,從休眠模式中喚醒,然后比較自身ID號與接收信號中的ID號是否一致,ID號不相符的標簽再次進入休眠模式,而ID相符的標簽則進入接收模式,接收信號并定位解算出其位置數據,并將位置數據送到處理器進行處理。文獻[4]中已經研究了基于RFID的停車場無線定位方案,而我們提出了一種基于Wi-Fi的RFID定位方案,通過多個Wi-Fi AP接入點內的讀寫器分別讀取待定位Wi-Fi終端內的RFID標簽,將獲得的位置數據進行融合,最終得到RFID標簽的位置信息。如圖2給出了基于該定位算法的結構化框圖。

圖2 基于信號強度的定位算法框圖
基于信號強度的定位算法是用一個位置已知的參考標簽與待定位Wi-Fi終端的標簽接收同一個AP接入點的定位信號。參考標簽所測得的位置與該點已知值進行比較后,獲得讀寫器的定位數據的校正值,然后及時將此校正值發送給待定位的標簽,修正標簽所測得的實時位置信息S,并將此信息上傳給讀寫器。在此過程中始終保持只有一個讀寫器工作,其余的讀寫器處于休眠狀態,當一個讀寫器完成位置信息采集后,再由其他讀寫器完成同樣的過程,這種定位方式下至少需要進行3次位置信息的采集。假設信號強度公式與讀寫器和標簽之間的距離有關,則簡單信號傳播模型可用式(1)表示:
P(r )= (P )-10alog(r/0r)(1)
式中, P(r)為標簽接收到的信號功率; r為標簽與讀寫器的距離; r0 為相對于讀卡器的參考距離; P(r)0 為該參考點的信號功率, 參數a 為路徑損耗隨著距離r 的增加而增加的速率。需要指出的是,通過該模型計算出的某個位置信號強度往往被估計得過高,實用性不大,比較實用的信號強度模型在文獻[6~7]中有比較詳細的介紹。
采用到達時間差(TDOA)算法是通過測量不同讀卡器接收到同一標簽的定位信號的時間差,并由此計算出標簽到不同讀寫器的距離差。標簽到任何兩個讀寫器的距離差D為定值,標簽必定位于兩個讀寫器為焦點的雙曲線上,當同時有N個讀寫器參與測距時(N≥3),由多個雙曲線之間的交匯區域就是對標簽位置的估計。TDOA只是測量各讀寫器接收到的同一標簽定位信號的到達時間差,參加定位的各個讀寫器在時間上不要求嚴格同步。假定測量第i 個讀寫器和第j個讀寫器的到達時間分別為 TAi 和TAj ,那么信號到達第i 個和第j 個讀寫器的時間差就是 TAji = TAi -TAj , 它們的距離差Rji = C*TAji .則標簽坐標與讀寫器坐標存在如下關系:

解上述方程組, 利用基于信號強度定位算法算出的坐標值及一些先驗知識(如室內半徑)從其兩個解中分辨出Wi-Fi終端的具體位置。
2 . 2 基于位置距離和角度的定位方案
文獻[5]中,P.Munishwar等人提出了一種基于RFID的機器人定位方案,我們在此工作基礎上提出了一種可以運用在Wi-Fi系統中的終端定位方案。該方案與基于信號強度的定位方案的不同在于引入了方向角的計算,通過距離和角度信息來實現Wi-Fi終端的定位。在Wi-Fi系統中需要設置了一個或多個傳感器,用來跟蹤待定位終端的運動,這些傳感器可以通過串行接口進行查詢,并返回自上次查詢之后終端的運動距離和角度信息。
內置在Wi-Fi終端內的RFID標簽允許待定位終端確定它的絕對位置(x,y),而位置的不確定性等于RFID讀寫器的最大標簽感知半徑。
系統定期運行算法一次(比如50ms),來獲取和處理傳感器和RFID讀寫器的數據。
通過RFID技術定期的重新校準終端位置和角度數據,每次定位算法運行時,它讀取傳感器兩次查詢之后的距離和角度差值變化,并把變化值分別累加到已知的位置和角度上,并且復位傳感器。傳感器可以從標簽兩次測量的坐標(x1,y1)、(x2,y2)來判斷它的運動方向,即:

如果終端在一條直線上運動, 那么△θRFID等于0,最后根據終端的位置和角度信息, 我們就可以對終端進行定位。圖3 給出了該定位算法的結構化圖示。
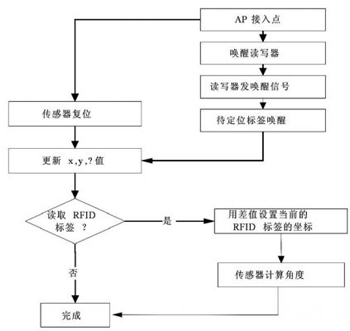
圖3 基于終端位置和角度的定位算法框圖
3 結語
本文主要探討了基于Wi-Fi的RFID定位系統的定位解決方案,主要對基于信號強度的定位方案以及基于距離和方向角的定位方案,相關試驗結果表明:這兩種定位算法都可以達到精度為1 米左右的定位誤差,可以滿足室內定位的精度需求,并且鑒于RFID設備在軟硬件成本上的優勢,RFID定位解決方案具有廣泛的實用潛力。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號