目前,對交通擁擠事件自動檢測算法的研究相對較少,仍然處于初始階段,并且利用RFID采集交通參數(shù)來判定交通擁堵的案例更是少之又少。在中國普遍采用的城市道路交通擁擠自動檢測算法主要是以路段上地感線圈檢測車流速度的降低、道路占有率的增加以及擁擠車流的存在為依據(jù)。算法依據(jù)實際路網(wǎng)的通行能力,設(shè)定流量和占有率的極限值來劃分交通是否處于擁擠狀態(tài)。但是此種方法采集的交通信息過于單一化,只能采集交通流信息,對于車輛的具體信息必須通過輔助設(shè)備才能獲取,增加了成本,而且安裝時需要破壞路面,影響道路使用壽命。
筆者針對物聯(lián)網(wǎng)與智能交通相結(jié)合的需求,提出一套基于RFID的交通流檢測方法,并根據(jù)揚州市城市道路建設(shè)規(guī)模以及揚州市各路口與路段統(tǒng)計的車流量特點,對揚州市道路擁擠行為的特征變量進行了深入的分析,以RFID設(shè)備采集到的流量相對增量、占有率相對增量以及地點平均車速這3個重要的指標(biāo)為基礎(chǔ),通過理論推導(dǎo)和統(tǒng)計分析,構(gòu)造出擁擠自動檢測算法,為交通管理部門提供決策依據(jù)。
1 交通擁擠檢測模型的建立
1.1 交通流參數(shù)的選取
道路交通參數(shù)是交通擁擠狀態(tài)自動判別的基礎(chǔ),為了使交通擁擠自動判別具有良好的效果,選擇的參數(shù)應(yīng)該具有直觀和可靠的特點。應(yīng)使采用這些參數(shù)的算法具有較強的有效性和可移植性。目前,車輛行駛速度、車流量和占有率是評價交通狀態(tài)最常用的3個交通參數(shù)。因此筆者綜合采用車輛占有率、流量和速度3個參數(shù)作為交通擁擠自動判別的參數(shù)。這里的車輛占有率主要是車輛的時間占有率,指在一定的觀測時間內(nèi),交通檢測器被車輛占用的時間總和與觀測時間長度的比值。
1.2 交通流參數(shù)數(shù)據(jù)采集處理的基本原理
文中采用RFID數(shù)據(jù)采集系統(tǒng)作為交通流參數(shù)數(shù)據(jù)采集前端。其由3部分組成:電子標(biāo)簽,閱讀器和天線。
基于閱讀器可以遠距離讀取,而且對高速運動的標(biāo)簽也能夠準(zhǔn)確捕獲的原因,在此筆者把其運用到交通領(lǐng)域來采集車輛信息從而反映交通流信息。其采集原理是將射頻標(biāo)簽貼在汽車擋風(fēng)玻璃上,每個標(biāo)簽都是唯一的且對應(yīng)著特定戶主的車輛。標(biāo)簽中存儲汽車的身份信息,包括車輛型號、車牌號碼、車主姓名、車子有無注冊等信息。當(dāng)貼有射頻標(biāo)簽的汽車經(jīng)過閱讀器的輻射場時標(biāo)簽會產(chǎn)生感應(yīng)電流被激活,然后和閱讀器進行無線通信,射頻標(biāo)簽將自身編碼等信息通過卡內(nèi)置發(fā)送天線發(fā)送出去,系統(tǒng)接收天線接收到從射頻卡發(fā)送來的載波信號,經(jīng)天線調(diào)節(jié)器傳送到閱讀器,然后閱讀器把讀取的數(shù)據(jù)傳輸?shù)接嬎銠C數(shù)據(jù)處理系統(tǒng)進行處理。因此每輛車經(jīng)過閱讀器的RF場時標(biāo)簽被讀取的次數(shù)、時間、場強及車輛的基本信息都被閱讀器記錄可供交通部門分析。具體的采集方式如圖1所示。

如圖2所示,在實際安裝應(yīng)用中,每個閱讀器安裝完成后會形成一個固定長度L的RF場,閱讀器距離地面的垂直高度為H。為了便于分析,文中需要提取每輛車經(jīng)過閱讀器RF場時標(biāo)簽被掃描到的次數(shù)、標(biāo)簽被掃描時系統(tǒng)記錄的時間以及對應(yīng)場強值RSSI,閱讀器的閱讀周期可以設(shè)定為T,即每隔T時間掃描一次。系統(tǒng)設(shè)定統(tǒng)計時間周期為t,即每隔時間t進行一次數(shù)據(jù)采樣。根據(jù)車輛行駛的特征以及RF場長度相對于行程路程較短的特點,可以假定每輛車經(jīng)過RF場時是平行車道運動的。
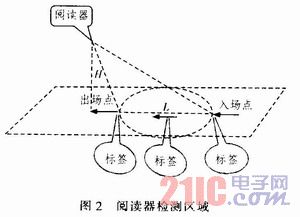
假設(shè)在第j個時間周期ti內(nèi)有n輛車通過RF場,第i輛車經(jīng)過RF場時被檢測到的次數(shù)為Ni,標(biāo)簽被掃描的時刻記為tik(k=1,2,…,Ni),對應(yīng)的場強值記為RSSIk(k=1,2.…,Ni)。根據(jù)文獻提出閱讀器接收到的場強值與距離關(guān)系的經(jīng)驗公式:

聯(lián)合公式(1)、(2)、(3)、(4)、(5)、(6)計算出某個周期的檢測點車流量,地點平均車速以及時間占有率,根據(jù)這些參數(shù)值并依據(jù)下文介紹的判別算法實現(xiàn)交叉路口交通流擁擠信息的判別。
1.3 交通流擁擠的判別準(zhǔn)則
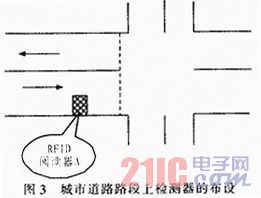
由于道路上交通流的復(fù)雜性,在路網(wǎng)中行進的車流運行狀態(tài)隨著時間的變化而時刻改變。在運行行為上,可以用暢通,輕度擁擠,一般擁擠,嚴(yán)重擁擠來描述。根據(jù)公安部交通部發(fā)布的《城市道路管理評價指標(biāo)體系》規(guī)定,城市路段的平均車速大于30 km/h時被視為暢通;平均車速在20~30 km/h之間時被視為輕度擁擠;平均車速在10~20 km/h之間時被視為一般性擁擠;平均車速在10 km/h以下時被視為嚴(yán)重擁擠。還有文獻介紹車輛在信號燈控制的交叉路口,3次綠燈顯示未通過路口的狀態(tài)定義為擁堵路口。根據(jù)上述規(guī)定,并結(jié)合揚州城市道路的規(guī)模,在如圖3所示的城市道路網(wǎng)中兩相鄰交叉口之間的路段上距離交叉口150 m的地方安裝RFID閱讀器,每個閱讀器附帶天線可以覆蓋整個車道的寬度范圍。一旦路口發(fā)生交通擁擠事件,則閱讀器A處的流量將減少,占有率將增加,速度也會減小。但是僅單個從流量或者占有率以及速度的增加、減少來對交通擁擠事件做出判斷,往往不能反映出擁擠過程的實質(zhì)。事實上,由于在單位時間內(nèi)檢測到的車輛數(shù)增加,如果車速保持不變,必然導(dǎo)致占有率的增長,如果流量的相對增量大于占有率的相對增量,則可以判斷出路口車流在這一段時間內(nèi)處于消散狀態(tài),反之可以判斷出車流處于擁擠形成狀態(tài)。
假設(shè)交通流是不間斷的連續(xù)流,則交通流基本模型成立,即
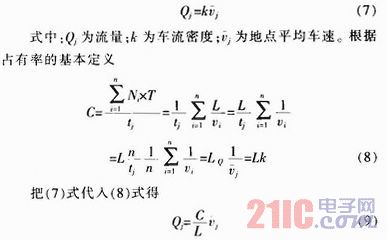
由(9)式可以看出,當(dāng)車流在正常運行狀態(tài)下并且地點平均車速不變時,流量和占有率成正比,且變化率相等,流量的相對增量與占有率的相對增量近似關(guān)系可以用y=x直線表示。由此,可以得知在交通事件發(fā)生時:
1) 當(dāng)流量的相對增量大于占有率相對增量時,速度在變大,車流趨于暢通狀態(tài)。
2) 當(dāng)流量的相對增量小于占有率相對增量時,速度在減小,車流趨于擁擠狀態(tài)。
2 交通擁擠檢測算法
2.1 交通擁擠檢測算法的基本原理
系統(tǒng)設(shè)定采樣周期為t,從t0開始統(tǒng)計,把總采樣時間劃分為若干個時間段,各個時間段都有相同的時間間隔t,劃分形式為[t0,t1],[t1,t2],[t2,t3],…[tn-1,tn]…。設(shè)A處的閱讀器在第j個時間段內(nèi)檢測的流量和占有率分別用QA(j)和CA(j)來表示,地點平均車速用來表示。為了降低誤判率,則路口發(fā)生交通擁擠事件的必要條件是:
1) A處閱讀器在連續(xù)3個周期內(nèi)檢測出地點平均車速均小于30 km/h,或者A處閱讀器在連續(xù)2個檢測周期內(nèi)檢測出占有牢相對增量均大于流量相對增量,并且地點平均車速在此兩個周期內(nèi)的值均低于30 km/h。此時可以判定路口嚴(yán)重交通擁擠事件發(fā)生。
2) A處閱讀器在連續(xù)2個周期內(nèi)檢測出地點平均車速均小于30 km/h,并且占有率相對增量大于流量相對增量的時間段不連續(xù),此時可以判定路口一般性交通擁擠事件發(fā)生。
3) A處閱讀器只在一個周期內(nèi)檢測到地點平均車速小于30 km/h,并且此周期的占有率相對增量大干流量相對增量,此時可以判定路口輕度交通擁擠事件發(fā)生。
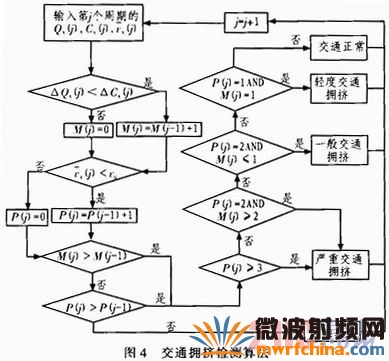
2.2 交通擁擠檢測算法的邏輯框圖
首先定義圖4框圖算法中的參數(shù):QA(j)為閱讀器A處第j個周期內(nèi)檢測到的流量值;CA(j)為閱讀器A處第j個周期內(nèi)檢測到的占有率;為閱讀器A處第j個周期檢測到的地點平均車速;△QA(j)為閱讀器A處第j個周期內(nèi)的流量相對增量,△CA(j)為第j個周期內(nèi)的占有率相對增量;v0為根據(jù)路口實際情況設(shè)定的速度閾值30 km/h;M(j)為占有率相對增量與流量相對增量相比較的計數(shù)值,P(j)為地點平均車速低于閾值的計數(shù)值。其中△QA(j)、△CA(j)的計算公式如下:

3 算例分析
以揚州市文昌路與揚子江路交叉口作為數(shù)據(jù)采集崗,并以距離停車線150 m的文昌中路上由西向東雙車道實際采集到的數(shù)據(jù)為例,運用圖4的檢測算法把采集到的交通流數(shù)據(jù)導(dǎo)入Matlab編寫的算法程序,對交通擁擠事件進行判別。具體的計算流程如圖5所示。
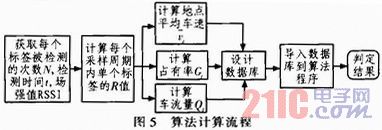
現(xiàn)在取09:11~09:25內(nèi)分10個采樣周期的數(shù)據(jù)為例作表1分析。經(jīng)過算法計算得到10個采樣周期內(nèi)每個時間段的交通情況,按照算法流程得到判別指標(biāo)時序。
程序中的邏輯判斷部分代碼如下:

4 結(jié)論
文中方法以RFID采集的交通流數(shù)據(jù)為基礎(chǔ),提出了一種新的交通流擁堵檢測判別算法,該方法可以為實時交通狀態(tài)自動識別奠定一定的研究基礎(chǔ),并且突破了傳統(tǒng)的交通流檢測模式,為物聯(lián)網(wǎng)引入智能交通提供可能性研究。隨著我國大力發(fā)展智能交通系統(tǒng)(ITS),以及物聯(lián)網(wǎng)行業(yè)的蓬勃發(fā)展,物聯(lián)網(wǎng)與智能交通相結(jié)合是必然的趨勢。因此RFID作為物聯(lián)網(wǎng)的信息采集前端用于智能交通必定有廣闊的應(yīng)用前景。
作者:張正華 胡方來 吳韜 殷有燁 戴磊 來源:現(xiàn)代電子技術(shù)
 粵公網(wǎng)安備 44030902003195號
粵公網(wǎng)安備 44030902003195號