0 引 言
隨著GPS 衛星應用產業化進程的逐步發展,對導航接收機關鍵技術的攻關必將縮短衛星導航終端產品的研發周期,推進衛星導航應用產業化的進程。在GPS 接收機中利用何種技術來快速跟蹤衛星多普勒頻偏的變化是面臨的主要挑戰。載波跟蹤環路設計是GPS 接收機中非常重要的環節,其性能的好壞直接影響到接收機的靈敏度。
本文通過GPS 接收機中載波跟蹤環路的設計與研究,討論載波跟蹤環路的實現方法和需要注意的細節,最后經過Matlab 仿真比較了幾種鑒頻和鑒相算法的性能,證明本文采用的算法正確合理,且適應高動態環境下對GPS 信號的跟蹤。
1 載波跟蹤環路基本模型
GPS 接收機完成對信號的捕獲、碼跟蹤后進入載波跟蹤環路,圖1 給出了載波跟蹤環路的基本模型。
載波預檢測積分時間、載波環鑒別器和載波環濾波器決定了載波跟蹤環的特性。為了容忍動態應力,預檢測積分時間應當短,鑒別器應為一個FLL,載波環濾波器的帶寬應當寬,但是為了使載波測量精確,預檢測積分時間應當長,鑒別器應為一個PLL,且載波環濾波器帶寬應當窄。為了解決這個矛盾,本文采用了一種二階FLL 輔助三階鎖相PLL 的方法,使環路從FLL有效過渡到PLL,既保證了接收機的動態性能,又提高了載波測量的精度。
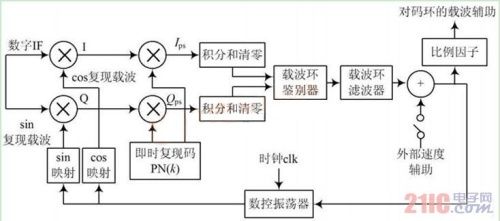
圖1 GPS 接收機載波跟蹤環方框圖
2 頻率鑒別器
FLL 通過復現衛星近似的頻率來完成載波剝離過程,信號I 和Q 的采樣時間不應跨越數據比特的跳變,在初始信號捕獲期間,接收機并不知道數據跳變的邊界在哪里。在完成比特同步的同時,與相位鎖定相比,一般說來更易與衛星信號保持頻率鎖定。常用的頻率鑒別器為四象限反正切鑒別器,其表達式為:

式中: cr ss = I ps1×Qps2 - I ps2 Qps1 ;dot = I ps1×I ps2 + Qps1×Qps2 ;I ps1 和Qps1 是在時刻t 1 下的相關值;I ps2 和Qps2 是在時刻t2 下的相關值;t2- t1 為預檢測積分時間。
采用這種鑒別器,t1 和t2 時刻的相關值采樣應該在同一數據比特時間區間內,但是初始捕獲階段接收機不知道數據跳變的邊界,所以本文采用二象限反正切鑒別器,有效防止了因數據跳變引起的頻率鑒別誤差,其表達式為:

3 相位鑒別器
PLL 通過復現衛星的準確相位和頻率( 已變換到中頻) 來完成載波剝離功能。因為CoSTas 鎖相環對數據調制不敏感,所以本文采用Costas 鎖相環,常用的鑒別器如表1 所示。
表1 常用Costas 環鑒別器
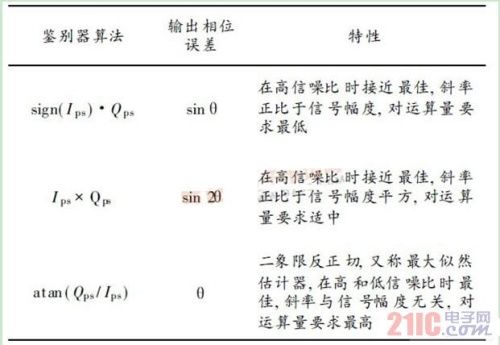
因為二象限反正切鑒別器的輸入誤差范圍在±90°區間上保持線性,所以本文采用二象限反正切鑒別器。
4 載波環濾波器
環路濾波器的作用是降低噪聲,以便對原始信號進行精確估計,其階數和帶寬決定了它對信號的動態響應。為了使接收機適應高動態環境,本文采用二階FLL 輔助三階PLL 的環路濾波器,其原理框圖見圖2。
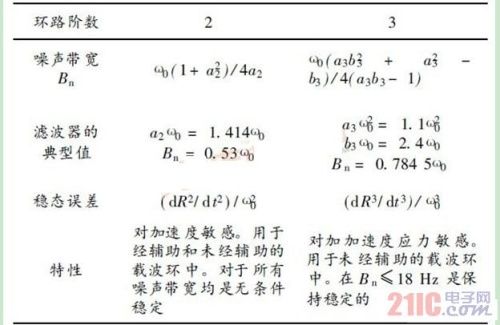
環路濾波器的特性見表2。
接收機完成捕獲、碼跟蹤后進入載波跟蹤模塊,由于此時多普勒頻移較大,所以FLL 與PLL 同時工作,給環路濾波器輸入頻差和相差,當頻率誤差減小到PLL 可以容忍的范圍時,將環路濾波器的輸入頻差設為零,即環路轉變為純PLL 跟蹤模式。
表2 環路濾波器特性
由圖2,環路濾波器的表達式為:
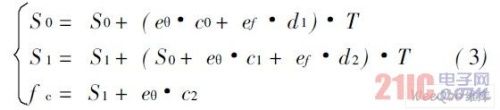
根據接收機的使用環境,確定環路濾波器的噪聲帶寬 Bnf 和B np ,就可以由表2 確定濾波器系數。注意,FLL 向濾波器的系數插入點與PLL 相比要提前一個積分器,這是因為FLL 誤差的單位是Hz,而PLL 誤差的單位是相位單位。
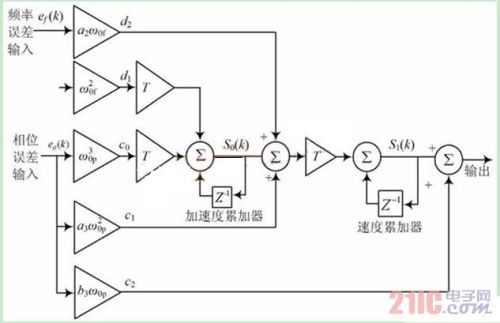
圖2 二階FLL 輔助三階PLL 濾波器
5 仿真結果及分析
5. 1 FLL 鑒別器特性
采用預檢測積分時間T= 1 ms,在有數據調制的情況下( ±1 跳變/ ms) ,輸入頻率誤差范圍為± 400 Hz,對四象限反正切( atan2) 和二象限反正切( atan) 鑒別器進行仿真,結果見圖3。由圖3 可以看出,atan2 鑒別算法已不能鑒別出真正的頻率誤差,而atan 可以鑒別的范圍達到±250 H z。
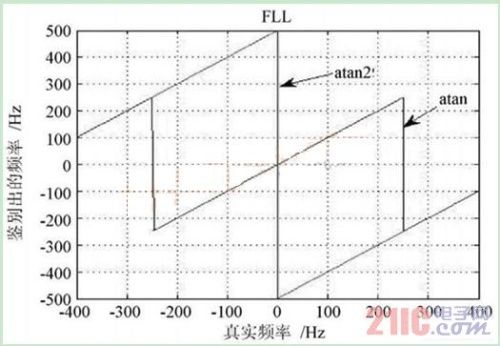
圖3 有數據調制下的FLL 鑒頻特性
5. 2 PLL 鑒別器特性
采用預檢測積分時間T= 1 ms,輸入相位誤差范圍為±180°,對表1 的三種相位鑒別器進行仿真,結果見圖4。通過圖4 可看出,只有二象限反正切( atan) 鑒別器在±90°的范圍內保持線性,且斜率與信號幅度無關。
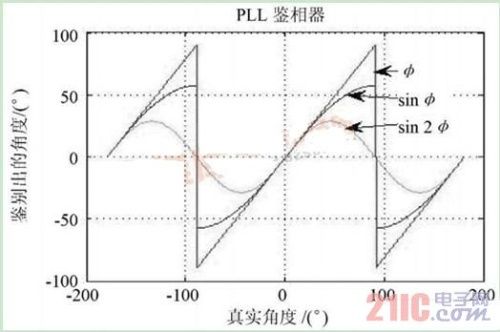
圖4 PLL 鑒相特性
5. 3 載波跟蹤環仿真及分析
根據5. 1 和5. 2 節的仿真結果,FLL 選擇二象限反正切鑒別器,PLL 也選擇二象限反正切鑒別器。將鑒別器結果送入圖2 所示的環路濾波器,濾波結果送給數控振蕩器,形成圖1 所示的閉環模式。接收機捕獲時采用時域和頻域二維搜索算法,根據FLL 鑒別器的頻率鑒別范圍,設定頻率搜索步長為500 Hz。接收機速度為500 m/ s,加速度為10g 時的仿真結果如圖5 所示。由圖5 可以看出,載波跟蹤環路可以快速、準確地跟蹤頻率的變化,在3~ 4 s 即可達到鎖定狀態。
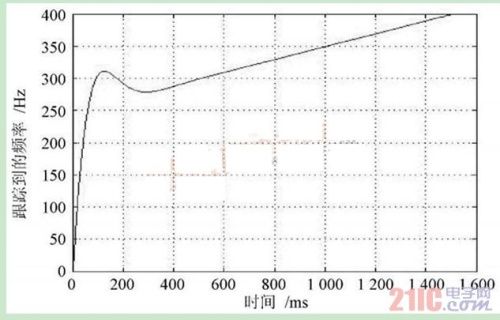
圖5 跟蹤到的頻率變化曲線
6 結 語
采用了二階鎖頻環輔助三階鎖相環的載波跟蹤環路。通過仿真可以看出,選用的鑒別器鑒別范圍大,精度高,且對數據跳變不敏感。由鑒別器、環路濾波器和數控振蕩器形成閉環回路,在高動態環境下,環路鎖定時間短,載波測量精度高,具有一定的實用價值。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號