毫米波雷達應用于室內人員檢測與跟蹤是近幾年新興的技術,原理是電磁波信號通過雷達天線發射出去,被其發射路徑上的物體阻擋而發生反射,再由雷達接收天線接收,通過對接收到的信號做一系列處理,可以確定物體的距離、速度和角度等信息。
目前用于室內人員檢測與跟蹤的傳感器除了毫米波雷達以外,還包括超聲、被動紅外、主動紅外(激光雷達、TOF)和光學攝像頭等傳感器,但是這些傳感器容易受外部環境(如光照、溫度等)影響,造成虛警的出現。而毫米波雷達則具備全天候的特性,在環境穩健性方面比其他傳感器優異很多,能夠滿足室內人員檢測在準確性、穩定性等方面的要求,因此毫米波雷達被越來越多的應用在安防監控、智能家居、智慧養老和自動門控制等領域。尤其在涉及到保護個人隱私生活等方面,毫米波雷達更有不可替代的天然優勢。
加特蘭毫米波雷達室內人員檢測與跟蹤應用是基于60GHz/77GHz毫米波雷達芯片研發,采用FMCW、MIMO等技術,具有距離精度高、速度精度高、角度分辨率高及虛警率低等優點,可以實現室內情況下對人員的準確檢測、精確定位和穩定跟蹤,并有效分類人與非人物體,統計室內人員個數,穩定輸出人員的距離、速度和角度等信息。圖1展示了加特蘭毫米波雷達傳感器在室內環境下對人員檢測和跟蹤效果示例,該傳感器消除了桌椅、墻等靜態物體,可以同時對三個人員進行準確檢測、精確定位和穩定跟蹤。
加特蘭毫米波雷達室內人員檢測與跟蹤應用通過采用FMCW、MIMO等技術,運用靜止物體消除算法、多徑干擾消除算法、群目標跟蹤算法和分類人與非人物體算法等關鍵算法,解決了室內多徑所帶來的虛假目標的難題,并有效分類出人與其他物體,實現室內環境下多目標跟蹤定位的功能。
靜止物體消除算法主要用于消除室內環境中靜止不動的物體(如墻、桌椅等),該算法在信號處理模塊和數據處理模塊均有涉及,通過消除零多普勒通道目標可以實現靜止物體的濾除,避免靜止物體對運動目標的干擾。
多徑干擾消除算法主要用于消除室內場景中目標運動所帶來的虛假檢測點,避免這些虛假檢測點被毫米波雷達傳感器誤認為目標進行跟蹤輸出,造成虛警的問題,如圖2所示。該算法會根據室內環境面積以及毫米波雷達傳感器所得到的原始檢測點信息(如距離、速度、角度和信噪比等), 進行綜合判決,判斷得到的原始檢測點是否為虛假點,從而將其濾除,大大降低室內環境下多徑所帶來的虛警問題。
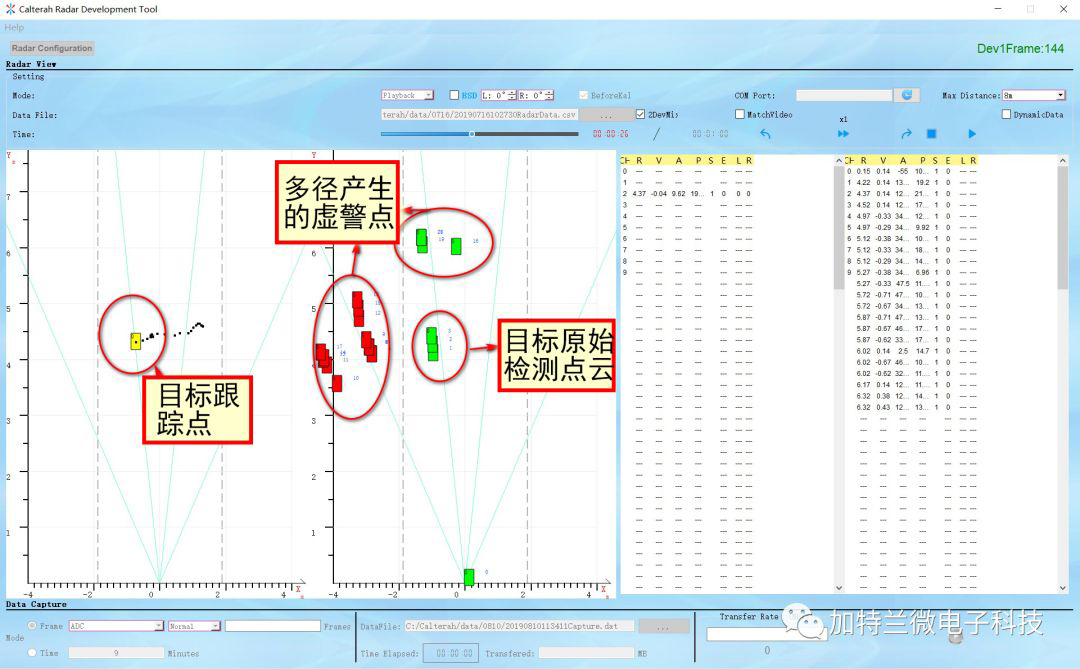
室內多徑產生的虛假檢測點
群目標跟蹤算法主要用于對室內環境下多個運動目標進行精確定位和穩定跟蹤。此算法首先會對原始檢測點進行有效聚類,得到不同目標類簇,然后借助擴展卡爾曼濾波算法對不同簇進行跟蹤濾波處理,最后得到穩定的運動目標航跡。
分類人與非人物體算法主要用于人與帶有微動的物體(如轉動的電風扇、飄動的窗簾等)的區分。微動的物體具有一定的多普勒速度,容易引起毫米波雷達傳感器的誤判,對其進行跟蹤輸出。分類人與非人物體算法會統計人與微動物體的特性,提取有效特征,進行目標分類,最后只輸出人員的跟蹤結果。
2019上海·工博會
9月17日至21日,在上海舉行的第21屆中國國際工業博覽會上,加特蘭微電子科技將為客戶做現場演示,歡迎蒞臨展位與技術人員進行現場交流。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號